|
ФЕДЕРАЛЬНОЕ АГЕНТСТВО
ПО ТЕХНИЧЕСКОМУ РЕГУЛИРОВАНИЮ И МЕТРОЛОГИИ
|
|

|
НАЦИОНАЛЬНЫЙ
СТАНДАРТ
РОССИЙСКОЙ
ФЕДЕРАЦИИ
|
ГОСТ Р ИСО
13373-1-
2009
|
Контроль состояния и диагностика машин
ВИБРАЦИОННЫЙ КОНТРОЛЬ СОСТОЯНИЯ МАШИН
Часть 1
Общие методы
ISO 13373-1:2002
Condition monitoring and diagnostics of machines –Vibration condition
monitoring - Part 1: General procedures
(IDT)
|

|
Москва
Стандартинформ
2010
|
Цели и принципы стандартизации в
Российской Федерации установлены Федеральным законом от 27 декабря 2002 г. № 184-ФЗ «О техническом
регулировании», а правила применения национальных стандартов Российской
Федерации - ГОСТ Р
1.0-2004 «Стандартизация в Российской Федерации. Основные положения»
Сведения о стандарте
1 ПОДГОТОВЛЕН Автономной некоммерческой
организацией «Научно-исследовательский центр контроля и диагностики технических
систем» (АНО «НИЦ КД») на основе собственного аутентичного перевода на русский
язык стандарта, указанного в пункте 4
2 ВНЕСЕН Техническим комитетом по
стандартизации ТК 183 «Вибрация, удар и контроль технического состояния»
3 УТВЕРЖДЕН И ВВЕДЕН В ДЕЙСТВИЕ Приказом
Федерального агентства по техническому регулированию и метрологии от 15 декабря
2009 г. № 858-ст
4 Настоящий стандарт является
идентичным по отношению к международному стандарту ИСО 13373-1:2002 «Контроль
состояния и диагностика машин. Вибрационный контроль состояния машин. Часть 1. Общие методы» (ISO
13373-1:2002 «Condition monitoring and diagnostics of machines - Vibration
condition monitoring - Part 1: General procedures»).
При применении настоящего
стандарта рекомендуется использовать вместо ссылочных международных стандартов
соответствующие им национальные и межгосударственные стандарты, сведения о
которых приведены в дополнительном приложении ДА
5 ВВЕДЕН ВПЕРВЫЕ
Информация об изменениях к настоящему
стандарту публикуется в ежегодно издаваемом указателе
«Национальные стандарты», а текст изменений и
поправок - в ежемесячно издаваемых информационных
указателях «Национальные стандарты». В случае
пересмотра (замены) или отмены настоящего стандарта
соответствующее уведомление будет опубликовано в
ежемесячно издаваемом информационном указателе «Национальные
стандарты». Соответствующая информация, уведомление
и тексты размещаются также в информационной
системе общего пользования - на официальном сайте Федерального
агентства по техническому регулированию и метрологии
в сети Интернет
Содержание
Введение
Основная задача вибрационного
контроля состояния машин - предоставить необходимую информацию о техническом
состоянии работающей машины для последующего технического обслуживания.
Составной частью этого процесса является оценка вибрационного состояния машины
в период ее работы. Цель настоящего стандарта - распространение хорошо
зарекомендовавших себя методов сбора данных и оценки вибрационного состояния. В
противоположность процедурам диагностирования и приемочных испытаний контроль состояния
включает в себя сбор данных на всем периоде эксплуатации машины, что позволяет
сопоставлять данные, полученные в разные моменты времени. При этом более важно
знать не текущее вибрационное состояние машины, а изменение этого состояния.
Изменения вибрационного
состояния обычно бывают вызваны:
- изменением дисбаланса
вращающихся частей;
- изменениями взаимного
расположения вращающихся валов;
- износом или повреждением
подшипников скольжения и качения;
- дефектами сопряжений, в том
числе в зубчатых передачах;
- развитием трещин в
ответственных элементах машин;
- работой машины в переходном
режиме;
- возмущениями в потоке жидкости
гидравлических машин;
- возмущениями электромагнитного
поля в электрических машинах;
- трением движущихся частей;
- ослаблением механических
соединений.
Информация, получаемая в
процессе вибрационного контроля состояния машин, может быть использована в
целях:
- защиты оборудования;
- повышения безопасности
обслуживающего персонала;
- повышения качества технического
обслуживания машин;
- обнаружения дефектов на ранней
стадии их зарождения;
- предотвращения опасных поломок
машин;
- продления срока эксплуатации
машин;
- улучшения качества работы
машин.
Измерения вибрации в процессе
контроля состояния машин могут быть как простыми, так и сложными, проводиться
как в непрерывном режиме, так и в фиксированные моменты времени, однако общая
цель этих измерений остается неизменной - получение точных и надежных сведений
о техническом состоянии машины.
Установленные настоящим
стандартом методы измерений соответствуют современной практике контроля
состояния с применением датчиков инерционного типа, а также датчиков
перемещений бесконтактного типа. Однако следует иметь в виду, что в настоящее
время получают развитие другие перспективные методы оценки вибрационного
состояния. Отсутствие упоминания о таких методах в настоящем стандарте не
должно ограничивать их применение.
ГОСТ Р ИСО 13373-1-2009
НАЦИОНАЛЬНЫЙ СТАНДАРТ РОССИЙСКОЙ ФЕДЕРАЦИИ
Контроль состояния и
диагностика машин
ВИБРАЦИОННЫЙ КОНТРОЛЬ
СОСТОЯНИЯ МАШИН
Часть 1
Общие методы
Condition monitoring and diagnostics of
machines. Vibration condition monitoring.
Part 1. General procedures
Дата введения - 2011-01-01
Настоящий стандарт устанавливает
общее руководство по проведению измерений и сбору данных о вибрации машины в
целях контроля ее состояния.
Настоящим стандартом установлены
общие рекомендации в отношении:
- методов измерений;
- измеряемых параметров;
- выбора датчиков вибрации;
- выбора точек измерений;
- способов крепления датчиков
вибрации;
- сбора данных;
- режимов работы машин;
- систем вибрационного контроля;
- устройств формирования сигнала
вибрации;
- соединения с устройствами
обработки сигнала;
- непрерывного и периодического контроля
вибрации.
Измерения вибрации в целях
контроля состояния проводят на подшипниковых опорах или корпусе машины, а также
на ее вращающихся частях. Такие измерения могут выполняться непрерывно или в
фиксированные моменты времени. Настоящий стандарт устанавливает рекомендуемые
способы измерений как для непрерывного, так и для периодического контроля.
Настоящий стандарт
распространяется только на методы вибрационного контроля состояния машин.
Зачастую при проведении комплексного анализа используют и другие методы оценки
состояния: тепловидение, анализ частиц в масле, феррографию, анализ изменения
эксплуатационных параметров машины (температуры, давления). Контроль состояния
на основе параметров невибрационной природы в настоящем стандарте не
рассматривается.
Настоящий стандарт
распространяется на машины вращательного действия, хотя многие из рассмотренных
методов могут быть применены и к машинам других видов, в частности, к машинам
возвратно-поступательного действия.
В настоящем стандарте
использованы нормативные ссылки на следующие стандарты:
ИСО 1925 Вибрация. Балансировка.
Словарь (ISО 1925,
Mechanical vibration - Balancing-Vocabulary)
ИСО 2041 Вибрация, удар и
контроль состояния. Словарь (ISO 2041, Mechanical vibration, shock and condition
monitoring - Vocabulary)
ИСО 7919-1:1996 Вибрация. Оценка
состояния машин по результатам измерений вибрации вращающихся валов. Часть 1. Общее руководство (ISO
7919-1, Mechanical vibration of non-reciprocating machines - Measurements on
rotating shafts and evaluation criteria - Part 1: General guidelines)
ИСО 10816-1:1995 Вибрация.
Оценка состояния машин по результатам измерений вибрации на невращающихся
частях. Часть 1. Общее руководство (ISО 10816-1, Mechanical vibration - Evaluation of
machine vibration by measurements on non-rotating parts - Part 1: General
guidelines)
В настоящем стандарте применены
термины по ИСО 1925 и ИСО 2041.
4.1 Общие положения
Контроль вибрации осуществляют
для оценки технического состояния машины в процессе ее непрерывного длительного
применения. В зависимости от вида машины и узлов, подлежащих контролю, измеряют
один или несколько параметров вибрации с помощью соответствующих измерительных
систем. Цель измерений - своевременно распознать отклонения состояния машины от
нормального, чтобы выполнить корректирующие действия до того, как дефекты в
различных частях машины приведут к ухудшению качества ее работы, сокращению
срока службы или отказу.
Ниже описаны несколько видов
систем контроля состояния. В зависимости от вида машины, ее состояния и других
факторов может быть выбрана одна из этих систем или их сочетание.
4.2 Системы вибрационного
контроля состояния
4.2.1
Общие положения
Системы контроля состояния могут
быть стационарными, полустационарными или предусматривать использование
портативных сборщиков данных. Выбор вида системы зависит от:
- степени важности машины;
- потерь от простоя машины;
- потерь в связи с
неисправностью машины;
- стоимости машины;
- скорости развития возможных
повреждений;
- доступности машины для
технического обслуживания и ремонта (например, машина может быть установлена на
атомной станции или в другом удаленном месте);
- доступности точек измерений
вибрации;
- эффективности системы контроля
(диагностики);
- режима работы машины
(скорости, производительности);
- стоимости системы контроля;
- безопасности работы машины;
- возможных воздействий на
окружающую среду.
4.2.2 Стационарные системы
контроля
В системах данного вида датчики
вибрации, согласующие усилители, устройства обработки и хранения данных
установлены постоянно. Сбор данных может осуществляться непрерывно или
периодически. Обычно такие системы используют для дорогостоящих или особо
важных машин, а также в случае сложных задач контроля. На рисунке 1 показана
типичная стационарная система, работающая в реальном масштабе времени.
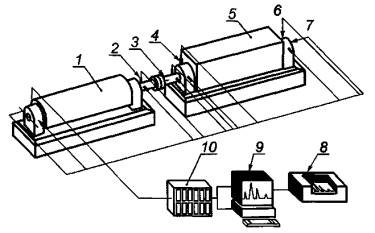
1 - механизм привода; 2 - датчик перемещений вала; 3 - отметка
фазы; 4 - датчик на опоре; 5 - приводной механизм; 6 - радиальное направление
измерений; 7 - осевое направление измерений; 8 - принтер; 9 - компьютер с
устройством хранения данных; 10 - устройство формирования сигнала
Примечание - На рисунке
показан пример типичной системы контроля. Возможны другие конфигурации системы
контроля (например, системы, где есть микропроцессор, часто имеют встроенное
устройство формирования сигнала после его преобразования в цифровую форму).
Рисунок 1 - Типичная стационарная система
контроля в реальном масштабе времени
4.2.3 Полустационарные
системы контроля
Полустационарные системы
занимают промежуточное положение между стационарными и переносными системами.
Полустационарные системы обычно включают в себя постоянно установленные
датчики, к которым в определенные моменты времени подключают сборщики данных.
4.2.4 Переносные системы
контроля
Переносная система контроля
выполняет те же функции, что и стационарная, но менее сложна и, как правило,
дешевле. Измерения в такой системе выполняют периодически, в автоматическом
режиме или вручную с помощью переносного сборщика данных. Типичная переносная
система контроля показана на рисунке 2.

1 - механизм привода; 2 - точка измерений; 3 - отметка фазы; 4 -
приводной механизм; 5 - радиальное направление измерений; 6 - осевое
направление измерений; 7 - принтер; 8 - компьютер с устройством хранения
данных; 9 - канал связи с компьютером; 10 - портативный сборщик данных; 11 -
датчик вибрации
Рисунок 2 - Типичная переносная система контроля
Как правило, переносные системы
используют, чтобы вручную записывать результаты измерений в заранее
установленных точках через заданные интервалы времени (неделю, месяц и т.д.).
Данные обычно вводят и сохраняют с помощью портативного сборщика данных.
Предварительный анализ производят непосредственно в процессе обхода, а для
проведения углубленного анализа собранные данные вводят в компьютер с
предварительно установленной программой их обработки.
4.3 Сбор данных
4.3.1 Общие положения
Сбор данных может осуществляться
в непрерывном режиме или периодически, а обработка данных - по наступлении какого-либо
события или через определенные интервалы времени.
4.3.2 Непрерывный сбор данных
В системах непрерывного сбора
данных датчики вибрации установлены стационарно в ключевых точках машины (см.
рисунок 1),
а результаты измерений записывают и сохраняют в непрерывном режиме в процессе
работы машины. Для переключения каналов может быть использован мультиплексор,
скорость мультиплексирования которого должна быть достаточно высокой, чтобы не
пропустить важных изменений в характере вибрации. Данные могут быть подвергнуты
обработке в широких или узких полосах частот для их последующего сравнения с
результатами предыдущих измерений. Если в системе установлен уровень
ПРЕДУПРЕЖДЕНИЕ, то оператор имеет возможность своевременно отреагировать на
изменение характера вибрации машины (как в сторону повышения, так и понижения)
и обратиться к соответствующим процедурам диагностирования.
Система непрерывного сбора
данных может быть установлена в непосредственной близости от машины для
использования обслуживающим персоналом, но может также передавать данные в
удаленный центр сбора и анализа информации. Одним из очевидных преимуществ
такой системы является возможность оценки состояния машины в реальном масштабе
времени.
В автоматизированных системах
сбора и анализа данных датчики вибрации закреплены на машинах постоянно, как в
стационарных системах контроля. Информацию регистрируют и сохраняют в
автоматическом режиме. Последние по времени получения данные сравниваются с
предшествующими с целью определить, не превышен ли уровень ПРЕДУПРЕЖДЕНИЕ.
Решение о необходимости
использовать систему непрерывного сбора данных следует принимать с учетом всех
факторов, перечисленных в 4.2.1.
4.3.3 Периодический сбор
данных
Периодический сбор данных может
быть осуществлен с помощью как стационарных, так и переносных систем контроля.
В стационарных системах это может быть реализовано в автоматическом режиме с
использованием мультиплексора. В этом случае все каналы передачи данных
коммутируются по очереди с учетом максимально допустимого периода ожидания.
Хотя система проводит измерения непрерывно, контроль вибрации в каждой точке
осуществляется в определенные интервалы времени, длительность которых зависит
от числа каналов и времени передачи данных по одному каналу. Такие системы
иногда называют сканирующими.
Если установка стационарной
системы для машины признана нецелесообразной, то для сбора данных используют
переносные системы, которые в большинстве случаев пригодны для периодического
контроля состояния.
4.4 Программа контроля
состояния машин
После выбора машин, подлежащих
контролю, и вида измерительной системы, полезно составить программу контроля
состояния. Типичная блок-схема такой программы показана на рисунке 3. В
конкретной ситуации блок-схема может быть скорректирована с учетом особенностей
машины и измерительной системы.
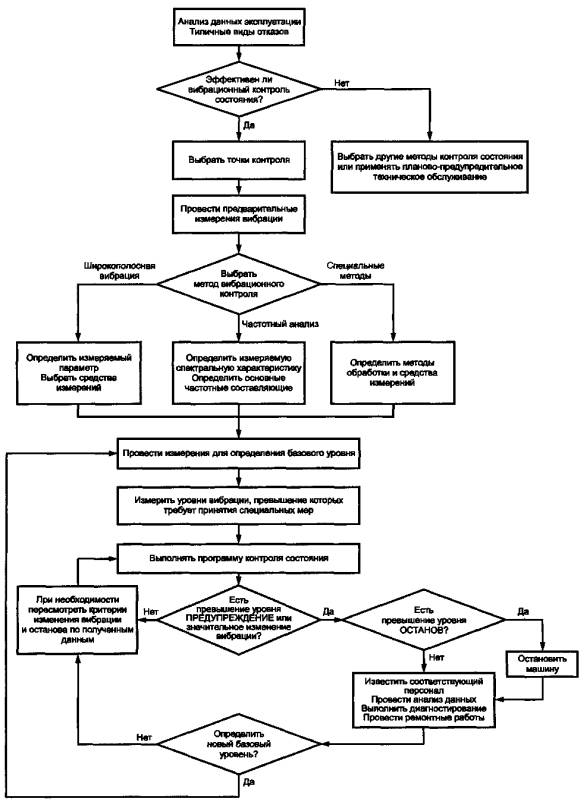
Рисунок 3 - Блок-схема программы вибрационного контроля состояния
Сбор вибрационных данных должен
сопровождаться описанием режима работы машины (скорость, нагрузка, температура
и т.п.). Описание должно включать в себя, по меньшей мере, сведения о частоте
вращения вала (в мин-1) и параметрах, характеризующих нагрузку
(мощность, характеристики потока жидкости или газа, давление), но может
содержать и значения других эксплуатационных параметров, которые могут влиять
на измеряемую вибрацию.
В общем случае при сборе данных
настоятельно рекомендуется поддерживать, насколько это возможно, приблизительно
одни и те же нормальные условия работы машины, чтобы обеспечить сопоставимость
результатов измерений. Если это невозможно, то необходимо точно знать рабочие
параметры машины, чтобы дать заключение о возможных причинах изменения
характера вибрации.
Поскольку контроль состояния
включает в себя наблюдение за трендом вибрации с определением скорости
изменения параметров вибрации со временем, то особенно важно, чтобы рабочие
условия, при которых получены данные последовательных измерений, оставались
неизменными, так как только в этом случае вывод об изменении параметров
вибрации будет достоверным. У насоса, например, параметры вибрации могут весьма
значительно различаться в зависимости от нагрузки. Поэтому необходимо следить,
чтобы изменение характера вибрации при изменении рабочих условий не было
ошибочно принято за проявление неисправности.
Нет необходимости в поддержании
неизменным интервала между двумя последовательными измерениями. Как показано в 7.3, его длительность
зависит от текущего состояния машины.
В зависимости от сложности
конструкции машины и целей измерений может оказаться полезным собирать данные о
вибрации для разных условий ее работы. Например, если в качестве возможных
дефектов предполагают дисбаланс, трение, трещину на валу или его прецессию, то
рекомендуется измерять вибрацию на переходных режимах работы (например, во
время разгона и выбега).
5 Измерения
5.1 Общие положения
В настоящем разделе приведены
сведения о видах измерений и измеряемых параметрах вибрации, которые используют
в целях вибрационного контроля состояния. Типичные сведения о машине и
регистрируемые данные приведены в приложении В.
5.2 Виды измерений
5.2.1 Общие соображения
Обычно используют измерения трех
видов:
a) измерения вибрации на
невращающихся частях машины (корпус подшипника, корпус машины или ее опора);
b) измерения перемещений ротора
относительно неподвижных частей (подшипника или корпуса машины);
c) измерения абсолютной вибрации
вращающихся частей машины.
При измерении вибрации на
невращающихся частях машины для оценки вибрационного состояния обычно
используют среднеквадратичное значение скорости, зачастую сочетая это с
измерениями среднеквадратичных значений ускорения и перемещения (см. ИСО
10816-1). Если вибрация носит преимущественно гармонический характер, то могут
быть также измерены пиковое значение или размах перемещения.
Для контроля состояния
высокооборотных машин (зубчатых передач) и машин с подшипниками скольжения
часто используют измерения пикового ускорения в сочетании со среднеквадратичным
значением скорости. В последнее время все чаще используют и другие, более сложные
методы оценки, позволяющие полнее использовать информацию, содержащуюся в
сигнале вибрации.
Абсолютные и относительные
перемещения вращающихся частей описывают с использованием параметров
перемещения, определенных в ИСО 7919-1:
- максимального отклонения оси
вала от среднего по времени положения Smax;
- размаха перемещения в
направлении измерений Sp-p.
Чтобы правильно интерпретировать
результаты полученных измерений, необходимо точно знать, какой именно параметр
перемещения был измерен.
Следует отметить, что стандарты
[3]-[6]
и [7]-[11]
основаны на измерениях вибрации в широкой полосе частот. Однако процедуры
контроля состояния могут включать в себя и другие методы измерений и анализа,
такие как:
- спектральный анализ;
- фильтрацию;
- анализ временной формы сигнала
и орбит движения точек машины;
- векторный анализ, учитывающий
амплитуду и фазу частотных составляющих;
- анализ огибающей
высокочастотного сигнала.
5.2.2 Точки измерений
вибрации
Места установки датчиков
вибрации зависят от особенностей машины и измеряемых параметров. Прежде, чем
определить точки измерений, необходимо задать измеряемый параметр, который
может характеризовать:
- абсолютную вибрацию на корпусе
машины;
- вибрацию ротора относительно
корпуса;
- положение вала относительно
корпуса при работе машины;
- абсолютную вибрацию вала.
Обычно рекомендуется
устанавливать датчики на подшипниковых опорах или рядом с ними. Однако полезной
может оказаться установка датчиков и в других местах, особенно если это
обусловлено практическими соображениями и подкреплено опытом наблюдений за
работой данной машины, например:
a) в точках, где наиболее
вероятен максимальный уровень вибрации (например, посередине промежуточного
вала крупной газотурбинной установки);
b) в точках наименьшего зазора
между движущимися и неподвижными частями, где наиболее вероятно их
соприкосновение.
Датчики следует устанавливать
таким образом, чтобы их измерительные оси совпадали с направлениями, в которых
возможна вероятность раннего обнаружения неисправности максимальна.
5.2.3 Точки измерений
вибрации для машин разных видов
В таблице А.1 приложения А указаны
рекомендуемые наиболее информативные точки установки датчиков вибрации для
машин разных видов. Данные таблицы А.1 охватывают только измерения вибрации
вала вблизи подшипниковых опор.
5.2.4 Идентификация положения
датчика вибрации
Местоположение и ориентация
датчика вибрации должны быть указаны так, чтобы можно было обеспечить точную
установку датчика при последующих измерениях. Важно установить единообразное
обозначение точек измерений. Пример соглашения об обозначении положения датчика
вибрации и его ориентации приведен в приложении D.
5.2.5 Измерения на
невращающихся частях
Стандарты [7]-[11]
устанавливают методы и средства оценки состояния машин разных видов по
среднеквадратичному значению скорости (в мм/с) как предпочтительному параметру
вибрации. Измерения могут быть проведены с использованием датчика скорости или
акселерометра с последующим интегрированием сигнала.
Для машин с горизонтальным расположением
вала вибрацию измеряют на корпусе или опоре подшипника, как показано на рисунке
4. Точки измерений для машин с вертикальным расположением вала показаны на
рисунке 5.
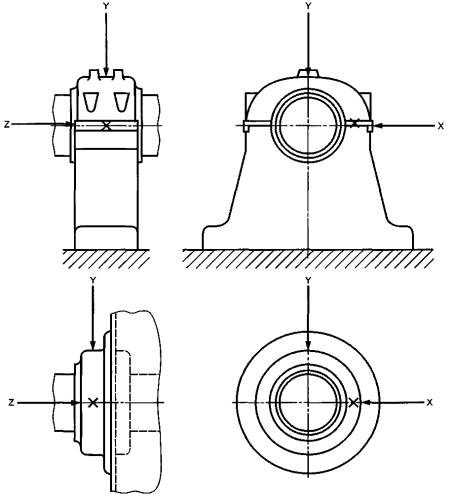
X - горизонтальное направление; Y - вертикальное
направление; Z - осевое направление
Рисунок 4 - Схематическое изображение типичных мест установки датчиков вибрации
на машине с горизонтальным расположением вала
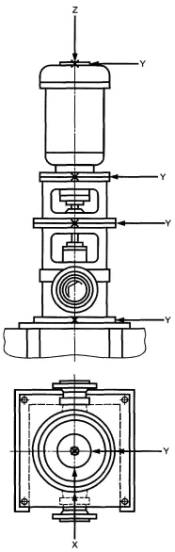
Рисунок 5 - Схематическое изображение типичных мест установки
датчиков вибрации на машине с вертикальным расположением вала
5.2.6 Измерения на
вращающихся валах
5.2.6.1 Общие положения
Как определено в ИСО 7919-1,
предпочтительным параметром при измерении вибрации вала является перемещение.
Ниже описаны различные типы датчиков и способы их установки. На рисунках 6-8
показаны также устройства согласования и обработки сигнала (см. 5.2.8).
Примечание - Особенности
обработки и анализа сигнала и представления данных рассмотрены в [25].
5.2.6.2 Колебания вала
относительно подшипниковых опор
Стандарты ИСО 7919-1 и [3]-[6]
установили методы и средства измерений перемещений вращающегося вала машин
разных видов в широкой полосе частот.
Относительные перемещения
предпочтительно измерять с использованием двух датчиков бесконтактного типа,
установленных в одной поперечной плоскости вала так, чтобы получать радиальные
колебания вала или другого вращающегося элемента машины относительно ее
неподвижной части. Типичный пример установки приведен на рисунке 6.
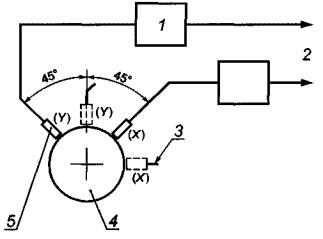
1 - устройства формирования данных; 2 - к устройству обработки
данных; 3 - дополнительные положения датчиков; 4 - вал; 5 - датчики перемещения
бесконтактного типа
Рисунок 6 - Система измерений относительных колебаний вала с использованием
датчиков перемещений бесконтактного типа
На каждой подшипниковой опоре
датчики устанавливают перпендикулярно друг к другу внутри подшипника или как
можно ближе к нему. В ряде случаев, например, для машин с гибким валом,
измерения целесообразно проводить и в других критических точках.
В любом случае места установки
датчиков следует выбирать так, чтобы измеряемая вибрация была чувствительна к
развиваемым машиной динамическим силам. Хотя угловое положение датчиков не
имеет принципиального значения, обычно их располагают в вертикальном и
горизонтальном направлениях или под углами ±45° относительно вертикального и
горизонтального направлений в зависимости от удобства доступа к вращающемуся
валу. При измерениях вместо пары датчиков можно использовать один датчик, если
известно, что он способен обеспечить достаточную информацию о состоянии машины.
Однако в этом случае ряд методов анализа (например, построение орбит движения
вала или измерение Smax) не может быть применен.
5.2.6.3 Абсолютная вибрация вала
Машины некоторых видов,
например, с податливой опорой ротора или с гибким ротором, а также машины,
работающие вблизи частоты собственных колебаний ротора, могут потребовать
проведения измерений абсолютной вибрации вала.
Примеры систем измерения
абсолютной вибрации вала показаны на рисунках 7 и 8.
|
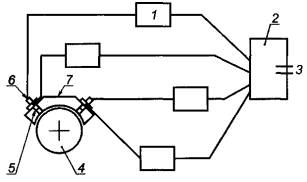
1 - устройства формирования данных; 2 - удаленное средство считывания
результатов измерений; 3 - дополнительный выход для устройств записи и
анализа данных; 4 - вал; 5 - датчики перемещения бесконтактного типа; 6 -
датчики инерционного типа; 7 – корпус машины
Рисунок 7 - Система измерений абсолютной (относительной) вибрации вала с
датчиками бесконтактного и инерционного типов
|
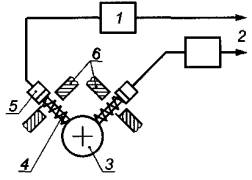
1 - устройства формирования данных; 2 - к устройству обработки
данных; 3 - вал; 4 - щуп; 5 - датчики инерционного типа; 6 - корпус машины
Рисунок 8 - Система измерений абсолютной вибрации вала с использованием
прижимных щупов с датчиками инерционного типа
|
Предпочтительным является
сочетание датчиков инерционного и бесконтактного типов, как показано на рисунке
7. Хотя в некоторых случаях может быть использован и контактный датчик-щуп,
показанный на рисунке 8, следует иметь в виду, что данный метод имеет
ограничения по диапазону частот и не способен дать информацию о радиальном
положении вала.
5.2.7 Угловая вибрация
Постоянный контроль угловой вибрации
валов машин вращательного действия редко используют на практике, однако следует
ожидать, что данный метод будет получать все большее распространение, особенно
для машин с приводом переменного тока с изменяющейся частотой вращения. В
настоящее время измерение угловой вибрации обычно проводят в исследовательских
целях на ограниченном числе энергоагрегатов для выявления зависимости этой
вибрации от колебаний напряжения в электросети. При этом наблюдают
возникновение угловой вибрации вала турбогенератора в ответ на переходные
процессы в сети (резкий скачок напряжения, короткое замыкание и т.д.), а также
в результате постоянно действующего возмущения (например, из-за несимметрии
линии электропередач).
Для контроля угловой вибрации
вала используют специализированное и, как правило, дорогостоящее
компьютеризированное оборудование, с помощью которого по результатам полученных
измерений в нескольких точках турбогенератора оценивают усталостную
долговечность наиболее ответственных элементов машины (см. также раздел С.3 приложения С).
Измеряемым параметром угловой
вибрации обычно является угловая скорость. Для измерений используют следующие
системы:
- установленный на свободном
конце вала торсиограф, который измеряет угловую скорость колебаний. Для
получения амплитуды углового перемещения вибрационный сигнал может быть
подвергнут интегрированию;
- установленное на свободном
конце или посередине вала зубчатое колесо в сочетании с электромагнитным
датчиком, закрепленным на неподвижной части машины. С датчика поступает сигнал
мгновенной скорости колебаний зубчатого колеса, преобразуемый в угловые
перемещения;
- установленный на свободном
конце или посередине вала диск с радиальными отметками в сочетании с
оптическими датчиками, которые измеряют мгновенную скорость и фазу проходящих
отметок. Сигнал преобразуют для получения углового перемещения;
- тензодатчик, установленный на
валу для непосредственного измерения переменной составляющей деформации
кручения;
- лазерные измерительные
системы.
Чтобы пересчитать данные,
полученные в точке установки датчика, в параметры колебаний в других точках
вала, необходимо применение соответствующих математических моделей. Обычно
преобразование результатов измерений в оценки напряжений и усталостных
характеристик требует применения сложных аналитических алгоритмов.
Примечание - Аппаратура и
программные средства, используемые для измерений угловой вибрации, достаточно
подробно описаны в технической литературе и не рассматриваются в настоящем
стандарте.
5.2.8 Устройства формирования
сигнала
Сигнал с датчика вибрации,
прежде чем поступить на устройство его обработки, обычно требует некоторого
преобразования. Системы формирования сигнала могут включать в себя устройства
преобразования выходного сигнала датчика в некоторую измеримую величину,
например, силу тока или напряжение, а также изменения формы сигнала.
Типичными примерами таких
преобразований являются усиление (ослабление) сигнала, его фильтрация,
масштабирование, сдвиг постоянного уровня и интегрирование.
В зависимости от сложности
измерительной системы цепь формирования сигнала может быть:
- встроенной в датчик вибрации,
- встроенной в измерительную
аппаратуру,
- выполненной в виде отдельного
блока на пути передачи сигнала отдатчика к измерительной аппаратуре,
- представлять собой сочетание
вышеперечисленных реализаций.
В простых системах, когда цепь
формирования сигнала встроена в датчик вибрации или измерительное устройство (или
в оба одновременно), у пользователя обычно мало возможностей по регулировке
этой цепи. Для более сложного оборудования, дающего широкие возможности в части
настроек, все выставленные настройки должны быть зафиксированы, чтобы иметь
возможность повторить их при дальнейших измерениях. Сравнение результатов
измерений при разных настройках цепи формирования сигнала может привести к
ложному предположению, что изменения измеряемой величины обусловлены изменением
технического состояния машины.
Если цепь формирования сигнала
выполнена в виде отдельного блока, то важно знать уровень выходного сигнала и
динамический диапазон измерительной аппаратуры, чтобы избежать внесения
искажений в измеряемый сигнал.
Для обеспечения достоверности
измерений частотная характеристика цепи формирования сигнала должна быть
согласована с характеристиками измерительной аппаратуры.
Примечание - Особенности
обработки и анализа сигнала рассмотрены в [25].
5.3 Измеряемые величины
5.3.1 Общие положения
Вибрация может быть
выражена через поступательные или угловые перемещения, скорости или ускорения.
За исключением особых случаев для оценки состояния машины по измерениям на
невращающихся частях используют измерения скорости. При контроле относительного
положения и движения вращающихся частей предпочтительным является измерение
перемещения. Ускорение целесообразно измерять, например, при контроле состояния
подшипников качения и зубчатых передач, поскольку дефекты этих узлов могут
проявляться в диапазоне высоких частот. В любом случае при выборе измеряемого
параметра вибрации необходимо предварительно оценить диапазон частот
возбуждения.
Ось вала, опирающегося на
гидродинамические подшипники, может иметь постоянное смещение. Хотя это
смещение не влияет на вибрацию вала, поскольку не изменяется со временем, но
оно измеряется датчиками перемещений и должно быть зафиксировано как точка
отсчета динамических перемещений вала машины.
5.3.2 Диапазон амплитуд
Диапазон амплитуд измерений
должен быть определен на основе либо предшествующего опыта работы с машинами данного
вида, либо на основе установленных для них критериев. При отсутствии
достаточного опыта можно обратиться к соответствующим международным стандартам
(например, [3]-[6]
и [7]-[11]),
в которых установлен диапазон амплитуд скорости.
Собственный шум измерительной
аппаратуры должен быть, по крайней мере, на 10 дБ (в три раза) ниже нижней
границы диапазона измерений. Измерительная система не должна выходить из строя
при входном сигнале с амплитудой, по крайней мере, на 10 дБ выше максимального
ожидаемого значения.
5.3.3 Диапазон частот
Для обеспечения достоверного
контроля состояния машин измерительная система должна обеспечить проведение
измерений в широком диапазоне частот, включающем не только частоту вращения
вала и ее гармоники, но и характерные частоты, связанные с другими частями
машины: подшипниками, зубчатыми передачами, уплотнениями, лопатками, лопастями
и т.д. Диапазон частот, в которых проводят измерения, определяется видом
машины, но он не должен, как правило, превосходить диапазон линейности датчика
вибрации.
Диапазон линейности датчика
вибрации включает в себя частоты и амплитуды, для которых коэффициент
преобразования датчика постоянен (в пределах заданной точности измерений - см. 5.4).
Диапазон линейности
измерительной системы обычно охватывает частоты от 0,2fr (где fr -низшая частота вращения ротора) до 3,5fs (где fs - высшая характерная частота возбуждения, как
правило, не превышающая 10 кГц). Обычно высшая характерная частота возбуждения
вибрации представляет собой либо произведение частоты вращения ротора на число
лопаток, лопастей, зубьев шестерни и т.п., либо одну из характерных частот
подшипника качения. У насосов может иметь место возбуждение на более высоких
частотах, обусловленное кавитацией.
Для контроля стабильности
механической системы диапазон с верхней границей 10 кГц достаточен. Однако для
диагностирования таких узлов, как подшипник качения или зубчатая передача,
может потребоваться измерение вибрации на частотах выше 10 кГц и даже за
пределом рабочего диапазона датчика. В таких случаях само присутствие в сигнале
таких высокочастотных составляющих может служить важной информацией даже при
том, что амплитуды высокочастотных составляющих не могут быть определены точно.
Примечание - Более
подробная информация об анализе в области высоких частот содержится в [25].
5.3.4 Измерения фазы сигналов
При рассмотрении сигналов от
разных источников важно учитывать фазовые соотношения между ними. Фаза является
мерой углового или временного расхождения двух синусоидальных сигналов или
мерой отличия сигнала вибрации от некоторого опорного сигнала. При контроле
состояния машин обычно определяют запаздывание по фазе. В качестве отметки фазы
используют сигнал датчика синхронизации, генерируемый при прохождении валом
некоторой опорной точки. Задержка по фазе соответствует, например, временной
задержке между прохождением валом опорной точки и максимальным (или нулевым)
значением вибрационного сигнала. Отметка фазы может быть использована при
выполнении такой операции, как синхронное усреднение (накопление).
Положение опорной точки, часто
называемой точкой начала отсчета, может быть выбрано произвольно. Однако
рекомендуется совмещать ее, по возможности, со шпоночной канавкой вала. При
отсутствии шпоночной канавки используют другие характерные точки вала, которые
способны служить источником генерирования сигнала отметки фазы за один оборот
вала.
Наиболее часто измерения фазы
проводят для определения дисбаланса ротора и последующей корректировки его
масс. Кроме того, фазовые соотношения можно использовать для диагностирования
неисправности машины, измеряя относительные перемещения элементов машины, для
определения вектора температур, определения вида несоосности и трещины в
роторе; выявления перекрестных помех, идентификации резонансов конструкции
машины.
При измерениях фазы сигналов в
двух точках важно, чтобы датчики вибрации и устройства преобразования сигнала
имели идентичные характеристики. Это позволит избежать внесения
инструментальных искажений. В противном случае необходимо предусмотреть
соответствующую коррекцию сигналов.
5.4
Точность и повторяемость результатов измерений
Средства измерений, используемые
в целях контроля состояния машин, должны обеспечить линейность измерительной
цепи класса 1 или класса 2 (см. рисунок 9):
Класс 1: модуль коэффициента
преобразования измерительной цепи находится в пределах ± 5 % номинального
значения для всех амплитуд и частот измерений;
Класс 2: модуль коэффициента
преобразования измерительной цепи находится в пределах ± 10 % номинального
значения для всех амплитуд и частот измерений.
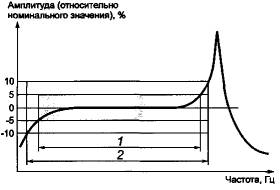
1 - линейность класса 1; 2 - линейность класса 2
Рисунок 9 - Частотная характеристика измерительной цепи
Измерения в диапазоне, где
модуль коэффициента преобразования отличается от номинального более чем на 10
%, не могут быть использованы для контроля состояния. В этом случае необходимо
принять специальные меры для обеспечения указанных требований. При этом следует
указывать, какому классу линейности соответствуют проведенные измерения. Не
менее важной характеристикой, чем точность измерений, является повторяемость их
результатов. Для обеспечения повторяемости измерения следует проводить с
использованием одной и той же аппаратуры, одних и тех же способов крепления
датчиков вибрации, при одной и той же частотной характеристике измерительной
цепи и с использованием одних и тех же методов ее калибровки. Если данные
требования не выполнены, то до определения и введения поправок на изменившиеся
условия измерений сравнение оценок состояния машины и определение тренда
контролируемых параметров выполнять не рекомендуется.
6.1 Типы датчиков
В целях вибрационного контроля
состояния машин применяют, в основном, датчики двух типов:
a) датчики инерционного типа,
устанавливаемые обычно на корпусе машины, выходной сигнал которых характеризует
абсолютную вибрацию корпуса;
b) датчики относительного
перемещения, с помощью которых измеряют относительные смещения и средние
положения вращающихся и невращающихся частей машины.
В редких случаях для машин некоторых
видов требуется применение других устройств снятия сигнала, например
тензодатчиков.
6.2 Выбор датчиков
6.2.1 Общие положения
Выбор датчика зависит от условий
его применения. В общем случае в целях вибрационного контроля состояния машин
используют:
- акселерометры, выходной сигнал
которых подвергается соответствующему преобразованию для получения требуемой
величины (ускорения, скорости или перемещения);
- датчики скорости, выходной
сигнал которых может быть проинтегрирован для получения сигнала перемещения;
- датчики бесконтактного типа,
выходной сигнал которых пропорционален относительному перемещению вращающейся и
невращающейся частей машины.
На рисунке 10 показаны типичные
динамические и частотные диапазоны датчиков, применяемых в целях вибрационного
контроля состояния машин. В особых случаях, в первую очередь, в целях
диагностирования, применяют датчики с расширенными диапазонами измерений.
Примечание - Диапазоны,
показанные на рисунке 10, охватывают все многообразие датчиков данного типа,
обычно применяемых для контроля состояния. Диапазон значений для каждого
конкретного датчика (особенно с расширенным диапазоном измерений) может быть
иным.
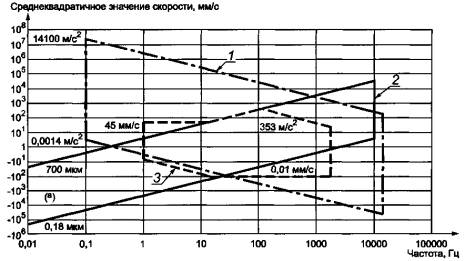
1 - пьезоэлектрический акселерометр; 2 - вихретоковый датчик; 3 -
электромеханический датчик скорости
а Вплоть до нулевой частоты.
Рисунок 10 - Диапазоны применения датчиков разных типов в целях вибрационного
контроля состояния машин
6.2.2 Акселерометры
6.2.2.1 Общие положения
Акселерометры являются датчиками
инерционного типа. Их выходной сигнал пропорционален ускорению поверхности, на
которой они установлены. Обычно акселерометры крепят на невращающихся частях
машины. Резонансные частоты установленных акселерометров обычно находятся в
диапазоне частот от 1 кГц и выше. Рекомендуется, чтобы диапазон линейности
акселерометра охватывал диапазон частот измерений. Для получения сигнала
скорости выходной сигнал акселерометра интегрируют. Двойное интегрирование
позволяет получить сигнал перемещения, однако применение этой процедуры
увеличивает погрешность измерений, особенно в области низких частот, поэтому
его, по возможности, следует избегать.
6.2.2.2 Типичные характеристики
и условия применения
Следующие характеристики
являются типичными для акселерометров:
- диапазон частот от 0,1 Гц до
30 кГц;
- масса (для датчиков,
используемых в целях контроля состояния) от 10 до 200 г;
- диапазон температур для
датчиков со встроенным усилителем заряда до 125 °С;
- диапазон температур для
датчиков с внешним усилителем заряда до 250 °С.
Акселерометры специального
назначения могут измерять ускорения в 100 раз меньше тех, что показаны на
рисунке 10.
6.2.2.3 Особенности применения
Акселерометры бывают разных
размеров. Для них характерен широкий динамический диапазон (от 1 до 106)
и широкий диапазон частот измерений. Акселерометры преимущественно используют,
когда нужно измерить вибрацию небольших объектов с малой площадкой для
установки датчика, при высоких температурах окружающего воздуха, в присутствии
сильных магнитных полей. Недостатком внешних усилителей заряда является высокая
чувствительность к повреждениям изоляции, значительным перепадам температуры и
движениям соединительных кабелей.
6.2.3 Датчики скорости
6.2.3.1 Общие положения
Напряжение на выходе датчика
скорости прямо пропорционально скорости вибрации измеряемого объекта. Обычно
датчики скорости устанавливают на невращающихся частях машины. Если для оценки
вибрации желательно получить сигнал перемещения, то выходной сигнал датчика
скорости интегрируют.
Упругомассовые характеристики
датчиков скорости обычно таковы, что их резонанс лежит в диапазоне частот от 4
до 20 Гц. В области много ниже частоты резонанса выходной сигнал датчика
скорости пропорционален первой производной ускорения, а в окрестности резонанса
зависит от внутреннего демпфирования. Поэтому в большинстве случаев истинные
значения скорости и фазовые соотношения могут быть определены только в
диапазоне частот много выше частоты резонанса датчика.
Если датчик вибрации используют в
диапазоне частот ниже частоты резонанса, то он должен быть соответствующим
образом калиброван. Современные датчики скорости электродинамического типа с
частотами резонансов свыше 10 Гц имеют встроенные электронные системы коррекции
коэффициента преобразования, позволяющие выполнять измерения ниже частоты
резонанса вплоть до 1 Гц.
6.2.3.2 Типичные характеристики
и условия применения Следующие характеристики являются типичными для датчиков
скорости:
- диапазон частот от 1 до 2000
Гц;
- диапазон температур от минус
50 °С до плюс 200 °С;
- масса от 50 до 200 г.
6.2.3.3 Особенности применения
Датчики скорости наиболее
пригодны для измерений низкочастотной вибрации. Большинство датчиков,
применяемых в целях контроля состояния, имеют резонансные частоты свыше 10 Гц.
Достоинством датчиков скорости
является относительно высокое выходное напряжение при низком сопротивлении
источника. Поэтому они малочувствительны к повреждениям изоляции и воздействию
электрических полей. Однако благодаря наличию движущихся элементов в
конструкции они чувствительны к механическим повреждениям и износу, которые
имеют место при превышении номинального диапазона допустимых динамических
воздействий. Кроме того, они чувствительны к высоким значениям вибрации в
плоскости, перпендикулярной к измерительной оси, и могут давать неправильные
результаты вследствие стрикции движущихся частей.
Датчики электродинамического
типа с одной катушкой очень чувствительны к внешним магнитным полям и нуждаются
в хорошем экранировании. Но даже экранирования может оказаться недостаточно,
если измерения проводят на электрических машинах с сильным внешним
электромагнитным полем. Чтобы избежать искажений выходного сигнала в
конструкции большинства датчиков скорости используют две катушки. Это делает их
менее чувствительными к внешним магнитным полям, позволяет обойтись без
дополнительного экранирования и тем самым уменьшить массу датчика.
6.2.4 Датчики перемещений
вала
6.2.4.1 Общие положения
Для машин вращательного
действия, особенно для крупных ответственных турбоагрегатов и машин, у которых
масса опорной конструкции велика по сравнению с массой ротора, может оказаться
необходимым проводить измерения перемещений ротора относительно статора.
Датчики перемещений вала представляют собой устройства бесконтактного типа, которые
непосредственно измеряют перемещение и определяют положение вращающегося вала
относительно подшипниковой опоры или корпуса машины. Выходной сигнал датчика
перемещений вала содержит переменную составляющую, соответствующую колебаниям
вала, и постоянную составляющую, определяемую средним положением вала
относительно датчика.
Использование датчика
перемещений вала совместно с установленным на корпусе датчиком инерционного
типа, чей выходной сигнал подвергнут интегрированию для получения сигнала
перемещения, позволяет получать сигнал абсолютного перемещения вращающегося
вала путем векторного суммирования сигналов этих двух датчиков. При наличии
фазового сдвига между выходными сигналами указанных датчиков он должен быть
скомпенсирован с помощью специального устройства.
6.2.4.2 Принцип работы
вихретоковых датчиков
Принцип действия большинства
датчиков бесконтактного типа основан на создании вихревых токов в колеблющемся
теле. Катушка, по которой течет ток высокой частоты, создает высокочастотное
магнитное поле. При попадании в поле токопроводящего объекта (например, ротора
машины) в материале объекта возникают вихревые токи, отбирающие мощность у
высокочастотного магнитного поля. Катушка датчика соединена с осциллятором, в
котором напряжение пропорционально расстоянию между датчиком и валом.
Конструктивно осциллятор может быть встроен в датчик или быть выполнен в виде
отдельного блока.
6.2.4.3 Типичные характеристики
и условия применения
Следующие характеристики
являются типичными для датчиков перемещений вала:
- диапазон частот от 0 до 10
кГц;
- диапазон измеряемых значений
от 1 до 10 мм;
- диапазон температур от минус
50 до плюс 200 °С;
- диапазон температур для
датчиков со встроенным осциллятором от минус 50 до плюс 125 °С.
6.2.4.4 Особенности применения
Датчики бесконтактного типа
чувствительны к изменениям температуры окружающего воздуха. Однако применение
электронных устройств компенсации позволяет, как правило, удерживать влияние
температурных расширений материалов в допустимых пределах.
Кроме того, при применении
датчиков перемещений вала необходимо соблюдать следующие требования:
a) вблизи наконечника датчика не
должно быть токопроводящих материалов;
b) на поверхности измерений не
должно быть частиц токопроводящих материалов и в ней не должно быть разрывов;
c) для измерений вибрации вала,
изготовленного из другого материала, нежели предыдущий, датчик должен быть
заново калиброван;
d) неоднородность
материала вала, его плакирование и остаточная намагниченность приводят к искажению
вибрационного сигнала (так называемые электрические биения вала).
Несовершенство поверхности вала (некруглость, наличие пазов и т.д.) также
влияют на результат измерений (так называемые механические биения);
e) электрические биения сводят к
минимуму соответствующей обработкой поверхности вала (дробеструйной или
абразивной очисткой, вальцеванием, индукционной закалкой).
6.3 Крепление датчиков
6.3.1 Общие положения
Результаты измерений критичны к
правильности передачи датчиком вибрации машины. Максимальную точность
обеспечивает фиксированная установка датчика с помощью специальных
приспособлений, однако в некоторых случаях допускается применение ручных щупов.
Способы крепления акселерометров
и влияние способа крепления на их работу рассмотрены в [2].
Ниже приведены общие рекомендации по этому вопросу.
Предпочтительным способом
фиксированной установки датчиков вибрации является жесткое крепление к
вибрирующей поверхности, для чего обычно в датчике и в корпусе машины делают
резьбовые отверстия и соединяют датчик с корпусом резьбовой шпилькой.
Соединение через шпильку позволяет передавать высокочастотные сигналы
практически без потерь. Поверхность машины, на которую устанавливают датчик,
должна быть ровной, плоской и чистой. Для улучшения передаточных свойств,
особенно на высоких частотах, рекомендуется покрывать контактирующие
поверхности тонким слоем силиконовой смазки или другим аналогичным веществом.
Если соединение через шпильку
невозможно из практических или иных соображений, то для установки датчика
используют клеящие вещества (мастики). После отвердевания данные вещества
должны иметь высокую жесткость. Клеящие вещества, которые после отвердевания
сохраняют упругость, не используют, поскольку такое соединение не обеспечивает
достаточную точность передачи сигнала.
Другим общеупотребительным
способом крепления, не требующим нарушения целости поверхности машины, является
установка датчика вибрации на магнит. Однако для данного способа важно, чтобы
поверхность крепления была плоской. Следует учитывать, что способы крепления на
магните и с помощью клеящих веществ имеют ограничения по диапазону частот,
температуре и амплитуде вибрации.
6.3.2 Влияние способа
крепления
В некоторых случаях используют
способ быстрой установки датчика вибрации в специальном держателе, который
закреплен на машине постоянно. При этом важно, чтобы все механические
соединения обеспечивали жесткую фиксацию. Кроме того, диапазон частот измерений
датчика вибрации в держателе должен охватывать требуемый диапазон частот
анализа.
Если применение постоянно
установленных датчиков нецелесообразно, то используют ручные щупы. Этот способ
имеет значительные ограничения по диапазону частот, и его обычно не рекомендуют
использовать для измерений на частотах свыше 1 кГц. Кроме того, данный способ
имеет невысокую точность и повторяемость измерений. В ряде случаев на результат
измерений может оказать существенное влияние высокочастотная вибрация
поверхности, которая с помощью ручных щупов обнаружена быть не может.
В таблице 1 показано, как
изменяется собственная частота установленного акселерометра (имеющего в
незакрепленном состоянии резонанс на частоте 30 кГц) в зависимости от способа
крепления.
В принципе, все вышесказанное
справедливо и для датчиков скорости. Однако в настоящее время не существует
стандартов, где были бы приведены численные оценки влияния крепления на
передаточные свойства датчика скорости.
Таблица 1 - Влияние способа крепления на работу датчика вибрации
|
Способ крепления
|
Влияние на передаточную
характеристику акселерометра с резонансной
частотой 30 кГц
|
|
На шпильку
|
Резонансная частота после установки остается неизменной (30 кГц)
|
|
На
изолированную шпильку
|
При использовании
жесткого электроизолирующего материала (например, слюдяной шайбы) для
устранения паразитных замыкающих контуров и других нежелательных эффектов
резонансная частота установленного датчика изменяется незначительно и равна
приблизительно 28 кГц
|
|
Жесткая
мастика
|
Резонансная
частота уменьшается приблизительно до 28 кГц
|
|
Мягкая
мастика
|
Резонансная
частота уменьшается приблизительно до 8 кГц
|
|
Постоянный
магнит
|
Резонансная
частота уменьшается приблизительно до 7 кГц
|
|
Ручной щуп
|
Резонансная
частота уменьшается приблизительно до 2 кГц, однако данный способ не
рекомендуется для измерений в диапазоне свыше 1 кГц
|
7.1 Общие положения
Измеряемые величины и виды измерений,
рекомендуемые в целях вибрационного контроля состояния машин, указаны в разделе
5. Результаты измерений могут быть
представлены и проанализированы многими способами, которые необходимо
определить перед тем, как устанавливать базовый уровень вибрации. Эти способы
включают в себя (но не ограничиваются):
- представление изменений
(тренда) параметров широкополосной вибрации;
- спектральный анализ;
- анализ изменений частотных
составляющих вибрации и вибрации в узких полосах частот;
- анализ каскадных спектров;
- представление данных в виде
диаграмм Боде и Найквиста, векторный анализ;
- анализ орбиты движения вала.
Методы многопараметрического
диагностирования и диагностические модели в виде нейронных сетей в настоящем
стандарте не рассматриваются.
Примечание - Более
подробная информация о методах анализа и представления данных - в [25].
7.2 Измерения базового уровня
7.2.1 Общие положения
Базовый уровень вибрации
представляет собой данные (набор данных), полученных в момент, когда машина
находится в хорошем состоянии, а ее работа может быть признана стабильной.
Результаты всех последующих измерений сравнивают с базовым уровнем для
выявления возможных изменений вибрационного состояния. Базовый уровень должен
определять стабильное вибрационное состояние машины предпочтительно в
нормальном режиме работы. Для машин с несколькими рабочими режимами может
потребоваться установление базового уровня для каждого из них.
У новых машин и машин после
капитального ремонта существует период приработки (обычно это первые несколько
дней или недель работы), в течение которого имеет место изменение параметров
вибрации. Поэтому сбор данных для определения базового уровня должен начинаться
после завершения периода приработки.
Базовый уровень может быть
определен и для машин, которые достаточно долгое время находились в
эксплуатации, прежде чем были включены в программу контроля состояния. За этот
уровень можно принять параметры вибрации на момент начала контроля.
Сбор данных о вибрации и
эксплуатационных параметрах машины следует повторить несколько раз через
определенные промежутки времени, чтобы убедиться в стабильности вибрационного
состояния. После этого можно определить базовый уровень вибрации и сравнить его
с рекомендациями соответствующих стандартов, чтобы оценить возможности
дальнейшей эксплуатации машины. Следует также проверить вибрацию, для которой
определен базовый уровень, на наличие характерных признаков, свидетельствующих
об отклонениях в техническом состоянии.
Дальнейшие неисправности будут
выявляться по результатам сравнения текущего вибрационного состояния с базовым
уровнем. Данные, определяющие базовый уровень, должны быть надежно сохранены и
легкодоступны.
В базовый уровень могут быть
включены все параметры вибрации, которые используют для описания вибрационного
состояния машины. Чем более полным будет это описание, тем больше вероятность
своевременного определения, анализа и отслеживания возникающих неисправностей.
Данные, используемые для определения базового уровня вибрации, могут включать:
- уровень широкополосной
вибрации (перемещения, скорости или ускорения);
- временной сигнал вибрации;
- частоту вращения ротора;
- амплитуду составляющей оборотной
частоты;
- векторы (амплитуду и фазу)
частотных составляющих вибрации;
- частотный спектр вибрации в
стационарном режиме;
- спектр огибающей
высокочастотной случайной вибрации;
- частотные характеристики для
режимов разгона и выбега (диаграмму Боде, каскадный спектр, диаграмму
Найквиста);
- орбиту движения вала;
- положение оси вала.
Полнота описания базового уровня
зависит от следующих факторов:
- степень важности машины;
- предшествующей истории
эксплуатации машины;
- доступных средств анализа
вибрации;
- возможностей персонала по
реализации разных методов анализа и контроля и др.
Точки измерений, в которых
получены данные базового уровня, не должны ограничиваться точками,
используемыми для непрерывного контроля состояния. Рекомендуется, чтобы в
базовый уровень входило больше данных (больше точек и направлений измерений, с
большим разрешением и в более широком диапазоне частот), чем требуется для
проведения обычных программ контроля состояния. Если в процессе непрерывного
или периодического мониторинга в небольшом количестве точек будет обнаружено
изменение вибрационного состояния, то проведение более полного анализа,
аналогичного тому, что был выполнен при определении базового уровня, может
помочь определить причины этого изменения.
7.2.2 Широкополосная вибрация
Если только опыт эксплуатации
машины не позволяет уменьшить требования к сбору данных, то данные о
широкополосной вибрации базового уровня должны быть получены в широком
динамическом и частотном диапазонах, чтобы учесть влияние всех важных сил, действующих
в машине. Обычно для этого необходимы измерения среднеквадратичных значений
скорости в диапазоне от 0,1 до 100 мм/с в полосе частот, нижняя граница
которого составляет 0,2fr (где fr - низшая частота вращения ротора) до 3,5fs (где fs - верхняя граница диапазона частот анализа).
Для большинства машин этот диапазон простирается до 10 кГц. Нижняя граница
составляет обычно 10 Гц, за исключением случаев низкоскоростных машин, где она
может быть меньше.
Методы измерения широкополосной вибрации
ротора и невращающихся частей машины установлены, соответственно, в стандартах
[3]-[6]
и [7]-[11].
Базовый уровень для отдельных
частотных составляющих должен быть получен для того же динамического диапазона
и для той же частотной характеристики, что и при измерениях широкополосной
вибрации, чтобы позволить выявить возможные причины возбуждения вибрации (см.
приложение С). Однако
при определении базового уровня могут быть обнаружены значительные составляющие
на нехарактерных частотах. Это может быть признаком зарождающейся неисправности,
поэтому следует выявить причины появления таких составляющих.
Наличие составляющих вибрации на
нехарактерных частотах может объясняться также особенностями конструкции
конкретной машины. Такие составляющие в приложении С не рассматриваются.
7.3 Тренд
параметров вибрации
7.3.1 Общие положения
При формировании программы
наблюдений за долговременными изменениями вибрации важно правильно установить
интервал между измерениями. Для новых машин или машин после капитального
ремонта, которые работают в стационарном режиме, периодичность диктуется тем,
насколько важна безотказная работа данной машины, насколько надежной она
показала себя в предшествующей эксплуатации и каковы возможности хранения
собранной информации.
Для систем непрерывного сбора
данных, работающих в реальном масштабе времени, при отсутствии заметных
изменений вибрации за установленное время предусматривают периодический сброс
«старых» данных, которые не имеют значительной ценности. Для систем
периодического контроля при обнаружении начала стабильного изменения уровня
вибрации рекомендуется сокращать интервалы между измерениями и больше внимания
уделять анализу данных. Ниже эти вопросы рассмотрены более подробно.
При контроле изменения вибрации
в процессе разгона (выбега) измерения проводят при заранее установленном (в
зависимости от вида машины) шаге изменения частоты вращения. Для крупных
медленно разгоняющихся машин иногда достаточно проводить измерения с шагом
изменения частоты вращения 5 мин-1. Для быстро разгоняющихся машин
измерения вибрации обычно проводят в непрерывном режиме.
7.3.2 Тренд параметров
широкополосной вибрации
7.3.2.1 Общие положения
При установлении критериев
оценки вибрации вращающихся валов или неподвижных элементов машины
рассматривают три фактора:
a) значение контролируемого
параметра вибрации;
b) любые значительные изменения
контролируемого параметра вибрации;
c) скорость изменения
контролируемого параметра вибрации.
При вводе новой машины в
эксплуатацию оценку осуществляют сравнением вибрации машины с некоторым заранее
установленным и согласованным значением. Однако после начала эксплуатации и
определения значений параметров вибрации, соответствующих нормальной устойчивой
работе машины, оценку осуществляют, основываясь не только на абсолютных
значениях параметра вибрации, но и на его относительных изменениях.
Критерии необходимости
технического обслуживания машин вращательного действия установлены в двух
сериях стандартов. Стандарты [3]-[6]
посвящены измерениям и оценке широкополосной вибрации вращающихся валов (в
машинах без возвратно-поступательного движения), стандарты [7]-[11]
- измерениям и оценке широкополосной вибрации на невращающихся частях машин.
Критерии оценки в обеих сериях стандартов представлены в виде четырех зон
вибрационного состояния (для абсолютного значения параметра вибрации), а также
для изменений параметра вибрации.
Опыт эксплуатации машин разных
видов на разных рабочих скоростях показал, что в большинстве случаев
вибрационное состояние машин удобно описывать через параметры скорости. В то же
время управление по параметрам скорости вибрации без учета ее частотного
состава может привести к недопустимо большим значениям перемещения. Это
характерно, в частности, для машин с низкой частотой вращения ротора, где
доминирует составляющая оборотной частоты. С другой стороны, использование
критериев только на основе скорости для машин с высокой частотой вращения
ротора или для машин, взаимодействие элементов которых приводит к появлению
высокочастотной вибрации, может приводить к недопустимо большим значениям
ускорений. Поэтому в общем виде критерии по параметрам скорости имеют вид,
показанный на рисунке 11.
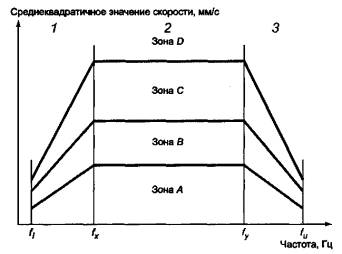
1 - область границ постоянного перемещения; 2 - область границ
постоянной скорости; 3 - область границ постоянного ускорения
Рисунок 11 - Зоны вибрационного состояния
На графике указаны верхняя fu и нижняя fl границы диапазона частот анализа, а также
частоты перехода fx и fy. В областях ниже частоты fx и выше частоты fy граница зоны состояния становится зависимой
от частоты. В диапазоне между fx и fy применяют критерии на основе постоянного
значения скорости. Критерии оценки и значения fl, fu, fx и fy для машин разных видов приведены в [7]-[11].
Вибрационное состояние новых
машин, только что введенных в эксплуатацию, обычно соответствует зоне А. Машины, чье вибрационное состояние
соответствует зоне В, обычно
считают годными к долговременной работе без каких-либо ограничений. Если
вибрационное состояние соответствует зоне С, то машины считают
непригодными к долговременной работе. Обычно допускают работу таких машин
ограниченное время до тех пор, пока не появится возможность проведения
корректирующих действий. Если вибрационное состояние машины соответствует зоне D, то считают, что вибрация таких машин
чрезмерно велика и свидетельствует о развитии повреждений.
Уровень ПРЕДУПРЕЖДЕНИЕ может
сильно варьироваться в зависимости от конфетной машины. Обычно его
устанавливают относительно базового уровня вибрации, определенного на основе
опыта эксплуатации и имеющихся результатов измерений в заданных точках и
направлениях для отдельной машины или класса машин.
Рекомендуется устанавливать
уровень ПРЕДУПРЕЖДЕНИЕ выше базового уровня на 25 % значения верхней границы
зоны В. Если базовый уровень низок, то уровень ПРЕДУПРЕЖДЕНИЕ может
лежать ниже зоны С.
Если базовый уровень не
установлен (например, для новых машин), то уровень ПРЕДУПРЕЖДЕНИЕ рекомендуется
определять на основе опыта эксплуатации аналогичных машин или по согласованию
между заинтересованными сторонами. После накопления данных о работе машины и
построения для нее базового уровня вибрации уровень ПРЕДУПРЕЖДЕНИЕ должен быть
уточнен.
В любом случае рекомендуется,
чтобы уровень ПРЕДУПРЕЖДЕНИЕ не превышал верхнюю границу зоны В более чем на 25 %.
Если базовый уровень вибрации
изменился (например, после капитального ремонта), то уровень ПРЕДУПРЕЖДЕНИЕ
может быть соответствующим образом изменен.
Уровень ОСТАНОВ обычно связывают
с условием сохранения механической целости машины, поэтому он зависит от ее
конструктивных особенностей, в том числе от проектных решений, обеспечивающих
способность конструкции машины выдерживать воздействие развиваемых ею
динамических сил. Как следствие, уровень ОСТАНОВ обычно одинаков для всех машин
данной (или аналогичной) конструкции и, как правило, не связан с базовым
уровнем, в отличие от уровня ПРЕДУПРЕЖДЕНИЕ.
Вследствие многообразия конструкций
машин невозможно дать общие правила по установлению уровня ОСТАНОВ. Обычно этот
уровень лежит в пределах зон С или D, но рекомендуется, чтобы он превышал верхнюю
границу зоны С не более чем в 1,25 раза.
Границы зон, установленные стандартами [3]-[6]
и [7]-[11], построены на основе статистической
обработки данных, полученных в ходе широкого обследования машин разных видов.
Действия, предпринимаемые при
вибрационном состоянии машины, соответствующем каждой из указанных зон, зависят
от скорости изменения контролируемого параметра вибрации.
Вышеуказанные критерии принимают
по внимание и при установлении интервала между измерениями при периодическом
мониторинге и между наблюдениями данных при непрерывном контроле состояния
машин. Этот интервал зависит от значения контролируемого параметра и скорости
его изменения. Соответствующие рекомендации приведены ниже и проиллюстрированы
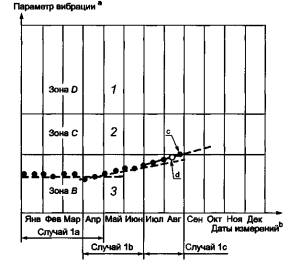
рисунками 12 и 13.
|
|
1 -
необходимо принятие мер; 2 - необходим тщательный контроль; 3 - нормальная
устойчивая работа
а Размах перемещения (мкм)
или среднеквадратичное значение скорости (мм/с).
b Для сопоставления с
критериями по стандартам [3]-[6]
и [7]-[11].
с Прогнозируемое время,
после которого требуется принятие мер.
d Переход к сокращенным
интервалам между измерениями (в пределах 48 ч).
Рисунок 12 - Измерения широкополосной вибрации на
вращающихся валах или корпусе машины. Вибрация в области
«нормального состояния»
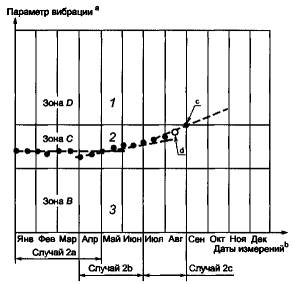
|
|
|
1 - необходимо
принятие мер; 2 - необходим тщательный контроль; 3 - нормальная устойчивая
работа
а Размах перемещения (мкм)
или среднеквадратичное значение скорости (мм/с).
b Для сопоставления с
критериями по стандартам [3]-[6]
и [7]-[11].
с Прогнозируемое время,
после которого требуется принятие мер.
d Переход к сокращенным
интервалам между измерениями (в пределах 48 ч).
Рисунок
13 - Измерения широкополосной вибрации на вращающихся валах или корпусе машины. Вибрация вблизи уровня ПРЕДУПРЕЖДЕНИЕ
|
7.3.2.2 Случай 1. Вибрация в области
«нормального состояния»
Если вибрация изменяется в
пределах зоны В, то
предпринимают следующие действия (см. рисунок 12).
a) При отсутствии существенных
изменений в вибрационном состоянии машины никаких действий не требуется.
b) При повышении вибрации с
постоянной скоростью изменения контролируемого параметра прогнозируют время
достижения верхней границы области «нормального состояния». Если это время
наступает после срока следующего измерения, то никаких действий не требуется. В
противном случае уменьшают интервалы между измерениями и наблюдают за
изменениями вибрации, пока указанная граница не будет достигнута.
c) Если кривая изменения
параметра вибрации нелинейна или скорость изменения параметра возросла более
чем на 25 % за время, прошедшее с момента последнего измерения, то контролируют
изменение вибрации в непрерывном режиме или сокращают интервалы между
измерениями и рассматривают возможность применения диагностических процедур.
7.3.2.3 Случай 2. Вибрация
вблизи уровня ПРЕДУПРЕЖДЕНИЕ
Если вибрация изменяется в
пределах зоны С, то предпринимают следующие действия.
a) Пока вибрационное состояние
машины остается неизменным, сохраняют прежнюю периодичность контроля.
b) Если наблюдается линейный
рост контролируемого параметра вибрации и ожидается, что этот параметр превысит
уровень, требующий принятия решений, то до наступления следующей даты планового
технического обслуживания или планового обследования, а также в случае
нелинейного изменения параметра контролируют изменение вибрации в непрерывном
режиме или, сокращая интервалы между измерениями, одновременно пересматривают
дату ближайшего технического обслуживания. В этот момент рекомендуется
применение диагностических процедур для выявления причин повышенной вибрации и
определения требуемых корректирующих действий. В случае понижения вибрации
рекомендуется вернуться к обычному режиму сбора данных и контроля вибрационного
состояние (для примеров, показанных на рисунках 12
и 13,
это означает возврат к двухнедельному интервалу между измерениями), но при этом
проведение диагностирования для выявления причин изменения вибрации,
по-прежнему, является целесообразным.
7.3.3 Вибрация в процессе
разгона (выбега)
В настоящем стандарте под
вибрацией в процессе разгона (выбега) понимают данные, снимаемые в режимах
пуска (останова) машины. Эти данные позволяют провести углубленное обследование
машины, которое невозможно осуществить только на основе измерений вибрации в
стационарном режиме работы. Отклик на дисбаланс, наличие резонансов конструкции
машины и отдельных элементов, включая критические частоты вращения валов,
демпфирование, дефекты электромагнитной природы, трение между движущимися
частями и трещины на валу - все это удобно выявлять и анализировать по
переходным процессам во время разгона (выбега). Получаемый при анализе
переходных процессов спектр будет трехмерным. Третьей координатой является
время или частота вращения. Если одной из координат является частота вращения,
то ее изменение должно быть привязано к оборотной частоте ротора. Обычно данные
измерений вибрации в процессе разгона (выбега) представляют в виде диаграмм
Боде, Найквиста, Кэмпбелла или каскадного спектра.
Характеристики вибрации в
процессе разгона (выбега) являются важным элементом описания базового уровня.
Чем больше таких характеристик будет включено в данные базового уровня, тем
выше вероятность своевременного обнаружения и отслеживания возникающих в машине
неисправностей, а также постановки правильного диагноза.
7.3.4 Тренд параметров
переходных процессов
Описание переходных
процессов является более сложным, чем процессов стационарных, но, тем не менее,
тренд параметров переходных процессов также используют для обнаружения
изменений в техническом состоянии машины. Комплексный анализ трехмерных
представлений данных позволяет выявлять неисправности, которые могли бы остаться
незамеченными при анализе данных стационарного режима работы.
Переходные процессы могут иметь
место даже в случае, когда скорость машины остается постоянной, если происходит
изменение внешних условий (температуры, давления и т.д.), нагрузки, параметров
режима и т.п. Поэтому важно, чтобы измерения переходных процессов, вызванных
данными изменениями, проводили и сопоставляли, по возможности, для одних и тех
же режимов работы.
7.4
Частотные составляющие вибрации
7.4.1 Общие положения
Измерения широкополосной
вибрации не всегда способны дать достаточную информацию для идентификации
причин превышения уровня ПРЕДУПРЕЖДЕНИЕ. Это особенно справедливо для машин
сложной конструкции, в которых вынуждающие силы проявляют себя на разных частотах.
В этом случае целесообразно разделить широкополосный сигнал на отдельные
частотные составляющие, характеризующиеся своими амплитудами и фазами. Как
правило, каждая такая составляющая связана с какой-нибудь движущейся частью
машины. Изменения частотных составляющих позволяет обнаружить нарушение в
работе машины или ее повреждение на более ранней стадии. Дисбаланс
(механической или тепловой), автоколебания, трение движущихся частей, дефекты
сопряжений, повреждения подшипников и зубчатых передач, трещины в роторе и др.
неисправности могут быть выявлены по дискретным частотным составляющим.
Обычно при вводе в эксплуатацию
новой машины или после капитального ремонта записывают ее спектр, который
является составной частью базового уровня. Этот эталонный спектр сравнивают со
спектрами, полученными в последующие моменты времени, для обнаружения возможных
изменений. Если спектр получен с применением быстрого преобразования Фурье
(БПФ), то следует обращать внимание на необходимость использовать при обработке
одни и те же полосы анализа и одни и те же весовые функции (окна).
Пример спектра вибрации
показан на рисунке 14. На нем ясно видны пики на характерных частотах. Если
пики становятся очень высокими, то необходимо выяснить причину их появления,
что позволит устранить ее на ранней стадии. Некоторые пики могут быть не
связаны с типичными неисправностями, рассмотренными в приложении С, а
объясняться особенностями конструкции машины.
Примечание - Более
подробно сопоставление широкополосной вибрации с частотным спектром рассмотрено
в [25].
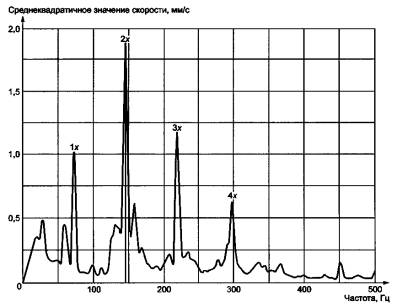
Рисунок 14 - Частотный спектр
7.4.2 Тренд частотных
составляющих вибрации
Слежение за изменениями амплитуд
характерных составляющих частотного спектра дает дополнительные возможности для
установления пороговых значений. На рисунке 15 показаны типичные примеры
изменения составляющих оборотной частоты и ее гармоник со временем.
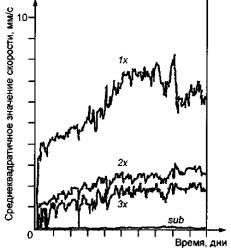
1х - первая
гармоника оборотной частоты; 2х
- вторая гармоника оборотной частоты; 3х - третья гармоника оборотной частоты; sub - субгармоника оборотной частоты
Рисунок 15 - Изменение частотных составляющих вибрации
7.5 Анализ огибающей
высокочастотной вибрации
В некоторых случаях изменения в
техническом состоянии машины проще обнаружить, анализируя огибающую
высокочастотной вибрации. Такой анализ может быть реализован несколькими
способами, не рассматриваемыми в настоящем стандарте.
Рекомендации настоящего
стандарта ограничены только общими вопросами сбора данных в процессе
вибрационного контроля состояния машин для получения значимых результатов в
реальных условиях ограничений практического и экономического характера. Анализ
полученных данных и форматы их представления - по [25].
Приложение А
(рекомендуемое)
В таблице А.1 приведен перечень
машин разных видов, для которых проводят измерения вибрации в целях контроля технического
состояния. В таблице указаны также применяемые для этого типы датчиков вибрации
с рекомендациями о месте их установки и направлениям измерений. В ряде случаев
число точек измерений может быть сокращено.
Данные таблицы А.1 следует использовать только в качестве общего
руководства и не рассматривать как какое-либо ограничение на виды машин, типы
датчиков, места измерений вибрации. Если конкретная машина не подпадает под те,
что указаны в таблице А.1, то для контроля ее состояния может потребоваться
иной тип датчика и другие точки измерений вибрации.
Таблица А.1 - Способы и точки измерений
|
Вид машины
|
Контролируемый параметр
|
Тип датчика
|
Точки измерений
|
Направления измерений
|
Соответствующий стандарт
|
См. примечание
|
|
Крупные
паротурбинные агрегаты с гидродинамическими подшипниками (электроэнергетика)
|
Относительные
перемещения
|
Датчик
бесконтактного типа
|
Вал у каждого
подшипника
|
Радиальные
(оси X и У или
|
[3]
|
1
|
|
или
|
|
|
|
|
|
|
Абсолютные перемещения
|
Сочетание
датчиков бесконтактного и инерционного типов
|
Корпус
каждого подшипника
|
под углами
±45° к ним)
|
|
|
|
Скорость или
ускорение
|
Датчик
скорости или акселерометр
|
Корпус
каждого подшипника
|
Радиальные
(оси Х и Y)
|
[7]
|
|
|
Осевые
перемещения вала
|
Датчик
бесконтактного типа или датчик осевого положения
|
Упорный
буртик
|
Осевое (ось Z)
|
|
|
|
Фаза и
частота вращения
|
Вихретоковый,
индуктивный или оптический датчик
|
Вал
|
Радиальное
|
|
|
|
Промышленные
паровые турбины малых и средних размеров с гидродинамическими подшипниками
(силовые приводы, электроэнергетика)
|
Относительные
перемещения
|
Датчик
бесконтактного типа
|
Вал у каждого
подшипника
|
Радиальные
(оси Х и Y или под углами ±45° к
ним)
|
[4]
|
|
|
Скорость или
ускорение
|
Датчик
скорости или акселерометр
|
Корпус каждого
подшипника и корпус турбины
|
Радиальные
(оси Х и Y)
|
[8]
|
|
|
Осевые
перемещения вала
|
Датчик
бесконтактного типа или датчик осевого положения
|
Упорный
буртик
|
Осевое (ось Z)
|
|
|
|
Фаза и
частота вращения
|
Вихретоковый,
индуктивный или оптический датчик
|
Вал
|
Радиальное
|
|
|
|
Промышленные
паровые турбины малых размеров с подшипниками качения
|
Скорость или
ускорение
|
Датчик
скорости или акселерометр
|
Корпус
каждого подшипника и корпус турбины
|
Радиальные
(оси Х и Y), Осевое (ось Z)
|
[8]
|
|
|
Фаза и
частота вращения
|
Вихретоковый,
индуктивный или оптический датчик
|
Вал
|
Радиальное
|
|
|
|
Промышленные
газовые турбины крупных и средних размеров с гидродинамическими подшипниками
|
Относительные
или абсолютные перемещения
|
Датчик
бесконтактного типа
|
Вал у каждого
подшипника
|
Радиальные
(оси Х и Y или под углами +45° к
ним)
|
[5]
|
|
|
Скорость или
ускорение
|
Датчик скорости
или акселерометр
|
Корпус
каждого подшипника
|
Радиальные
(оси Х и Y)
|
[9]
|
|
|
Осевые
перемещения вала
|
Датчик
бесконтактного типа или датчик осевого положения
|
Упорный
буртик
|
Осевое (ось Z)
|
|
|
|
Фаза и
частота вращения
|
Вихретоковый,
индуктивный или оптический датчик
|
Вал
|
Радиальное
|
|
|
|
Гидравлические турбины с
гидродинамическими подшипниками
|
Относительные перемещения
|
Датчик бесконтактного типа
|
Вал у ряда подшипников
|
Радиальные под углом 90°
|
[6]
|
2
|
|
Скорость или ускорение
|
Датчик скорости или акселерометр
|
Корпус каждого подшипника и корпус
турбины
|
Радиальные под углом 90°
|
[10]
|
3
|
|
Осевые перемещения вала
|
Датчик бесконтактного типа или датчик
осевого положения
|
Упорный буртик
|
Осевое (ось Z)
|
|
|
|
Фаза и частота вращения
|
Вихретоковый, индуктивный или
оптический датчик
|
Вал
|
Радиальное
|
|
|
|
Крупные насосы с гидродинамическими
подшипниками
- питательные,
- циркуляционные,
- технологические
|
Относительные или абсолютные
перемещения
|
Датчик бесконтактного типа
|
Вал у каждого подшипника
|
Радиальные (под углами +45° к осям Х и Y)
|
[4], [6]
|
4
|
|
Скорость или ускорение
|
Датчик скорости или акселерометр
|
Корпуса подшипников
|
Радиальные (оси Х и Y)
|
[8], [10]
|
|
|
Осевые перемещения вала
|
Датчик бесконтактного типа или датчик
осевого положения
|
Упорный буртик
|
Осевое (ось Z)
|
|
|
|
Фаза и частота вращения
|
Вихретоковый, индуктивный или
оптический датчик
|
Вал
|
Радиальное
|
|
|
|
Насосы средних и малых размеров с
гидродинамическими подшипниками
|
Относительные перемещения (применяется
редко)
|
Датчик бесконтактного типа
|
Вал у каждого подшипника
|
Радиальные (под углами ±45° к осям Х и Y)
|
[4]
|
4
5
|
|
Скорость или ускорение
|
Датчик скорости или акселерометр
|
Корпуса подшипников
|
Радиальные (оси Х и Y)
|
[8]
|
|
|
Осевые перемещения вала
|
Датчик бесконтактного типа или датчик
осевого положения
|
Упорный буртик
|
Осевое (ось Z)
|
|
|
|
Фаза и частота вращения
|
Вихретоковый, индуктивный или
оптический датчик
|
Вал
|
Радиальное
|
|
|
|
Насосы средних и малых размеров с
подшипниками качения
|
Скорость или ускорение
|
Датчик скорости или акселерометр
|
Корпус каждого подшипника и корпус
насоса
|
Радиальные (оси Х и Y), осевое (ось Z)
|
[8]
|
|
|
Фаза и частота вращения
|
Вихретоковый, индуктивный или
оптический датчик
|
Вал
|
Радиальное
|
|
|
|
Вертикальные насосы:
- для
охлаждения реактора,
- для подачи
хладоносителя
|
Относительные перемещения
|
Датчик бесконтактного типа
|
Вал насоса (двигателя) у каждого
доступного и верхнего осевого подшипника
|
Радиальные под углом 90°
|
[6]
|
3
|
|
Скорость или
ускорение
|
Датчик
скорости или акселерометр
|
Корпус
двигателя и каждого доступного подшипника
|
Радиальные
под углом 90°
|
[8]
|
3
|
|
Осевые перемещения
вала
|
Датчик
бесконтактного типа или датчик осевого положения
|
Вал двигателя
|
Осевое (ось Z)
|
[10]
|
|
|
Фаза и
частота вращения
|
Вихретоковый,
индуктивный или оптический датчик
|
Вал
|
Радиальное
|
|
|
|
Крупные
электродвигатели и генераторы с гидродинамическими подшипниками
|
Относительные
перемещения
|
Датчик
бесконтактного типа
|
Вал у каждого
подшипника
|
Радиальные
(под углами ±45° к осям Х и Y)
|
[4]
|
|
|
Скорость или
ускорение
|
Датчик
скорости или акселерометр
|
Корпус
|
Радиальные
(оси Х и Y)
|
[8]
|
|
|
Осевые
перемещения вала
|
Датчик
бесконтактного типа или датчик осевого положения
|
Упорный
буртик
|
Осевое (ось Z)
|
[10]
|
|
|
Фаза и
частота вращения
|
Вихретоковый,
индуктивный или оптический датчик
|
Вал
|
Радиальное
|
|
|
|
Электродвигатели
средних и малых размеров с подшипниками качения
|
Скорость или
ускорение
|
Датчик
скорости или акселерометр
|
Корпус
каждого подшипника, корпус электродвигателя
|
Радиальные
(оси Х и Y), осевое (ось Z)
|
[8]
|
5
|
|
Фаза и
частота вращения
|
Вихретоковый,
индуктивный или оптический датчик
|
Вал
|
Радиальное
|
|
|
|
Центробежные
компрессоры особой конструкции (4 угловых клапанных коробки) с
гидродинамическими подшипниками и жестким корпусом
|
Относительные
перемещения
|
Датчик
бесконтактного типа
|
Вал у каждого
подшипника, шарового шарнира, ведущей шестерни
|
Радиальные
(под углами ±45° к осям Х и Y)
|
[4]
|
|
|
Скорость или
ускорение
|
Датчик
скорости или акселерометр
|
На каждом подшипнике
или зубчатом зацеплении
|
Радиальные
(оси X
и У)
|
[8]
|
|
|
Фаза и
частота вращения
|
Вихретоковый,
индуктивный или оптический датчик
|
Каждый вал
|
Осевое (ось Z)
|
|
|
|
Центробежные
компрессоры
|
Относительные
перемещения
|
Датчик бесконтактного
типа
|
Вал у каждого подшипника
|
Радиальные
(под углами ±45° к осям Х и Y)
|
[4]
|
|
|
Скорость или
ускорение
|
Датчик
скорости или акселерометр
|
Корпуса
подшипников
|
Радиальные
(оси X и У)
|
[8]
|
|
|
Осевые
перемещения вала
|
Датчик
бесконтактного типа или датчик осевого положения
|
Упорный
буртик, торец вала
|
Осевое (ось Z)
|
|
6
|
|
Фаза и
частота вращения (для привода через редуктор)
|
Вихретоковый,
индуктивный или оптический датчик
|
Вал
|
Радиальное
|
|
|
|
Винтовые
компрессоры с двумя сцепленными роторами на гидродинамических подшипниках
|
Относительные
перемещения
|
Датчик
бесконтактного типа
|
Вал у каждого
подшипника
|
Радиальные
(под углами ±45° к осям Х и Y)
|
|
|
|
Скорость или
ускорение
|
Датчик
скорости или акселерометр
|
Крышки
подшипников и корпус компрессора
|
Радиальные
(оси Х и Y)
|
ИСО 10816-1
|
|
|
Осевые
перемещения вала
|
Датчик
бесконтактного типа или датчик осевого положения
|
Упорный
буртик
|
Осевое (ось Z)
|
|
|
|
Угол поворота
каждого вала
|
Датчик фазы
|
Каждый вал
|
Радиальное
|
|
|
|
Винтовые
компрессоры с двумя сцепленными роторами на подшипниках качения
|
Скорость или
ускорение
|
Датчик
скорости или акселерометр
|
Крышки
подшипников и корпус компрессора
|
Радиальные
(оси Х и Y), осевое (ось 2)
|
ИСО 10816-1
|
|
|
Угол поворота
каждого вала
|
Датчик фазы
|
Каждый вал
|
Радиальное
|
|
|
|
Крупные
зубчатые передачи с гидродинамическими подшипниками
|
Относительные
перемещения
|
Датчик
бесконтактного типа
|
Вал у каждого
подшипника
|
Радиальные
(под углами ±45° к осям Х и Y)
|
|
|
|
Скорость или
ускорение
|
Датчик
скорости или акселерометр
|
Крышки
подшипников и корпус зубчатой передачи
|
Радиальные
(оси Х и Y)
|
|
|
|
Осевые
перемещения вала
|
Датчик бесконтактного
типа
|
Каждый вал
|
Осевое (ось Z)
|
|
|
|
Зубчатые
передачи с подшипниками качения
|
Скорость или
ускорение
|
Датчик
скорости или акселерометр
|
Крышки
подшипников и корпус зубчатой передачи
|
Радиальные
(оси Х и Y), осевое (ось Z)
|
|
|
|
Крупные
вентиляторы с гидродинамическими подшипниками
|
Относительные
перемещения (применяется редко)
|
Датчик
бесконтактного типа
|
Вал у каждого
подшипника
|
Радиальные
(под углами ±45° к осям Х и Y)
|
[4]
|
7
8
|
|
Скорость или ускорение
|
Датчик скорости или акселерометр
|
Корпуса подшипников
|
Радиальные (оси Х и Y)
|
[8]
|
7
8
|
|
Осевые перемещения вала
|
Датчик бесконтактного типа или датчик
осевого положения
|
Упорный буртик, торец вала
|
Осевое (ось Z)
|
|
|
|
Фаза и частота вращения
|
Вихретоковый, индуктивный или
оптический датчик
|
Вал
|
Радиальное
|
|
|
|
Вентиляторы средних и малых размеров с
подшипниками качения
|
Скорость или ускорение
|
Датчик скорости или акселерометр
|
Крышка каждого подшипника и корпус
вентилятора
|
Радиальные (оси Х и Y), осевое (ось Z)
|
[8]
|
|
|
Центрифуги
|
Относительные перемещения
|
Датчик бесконтактного типа
|
Вал у каждого подшипника (при наличии
доступа)
|
Радиальные (под углами ±45° к осям Х и Y)
|
|
|
|
Скорость или ускорение
|
Датчик скорости или акселерометр
|
Каждый доступный подшипник
|
Радиальные (оси Х и Y)
|
ИСО 10816-1
|
|
|
Осевые перемещения вала
|
Датчик бесконтактного типа или датчик
осевого положения
|
Упорный буртик
|
Осевое (ось Z)
|
|
|
|
Фаза и частота вращения
|
Вихретоковый, индуктивный или оптический
датчик
|
Вал
|
Радиальное
|
|
|
|
Измельчители древесины
|
Относительные перемещения
|
Датчик бесконтактного типа
|
Вал у каждого подшипника
|
Радиальные (оси Х и Y)
|
|
|
|
Скорость или ускорение
|
Датчик скорости или акселерометр
|
Крышки подшипников
|
Радиальные (оси Х и Y)
|
ИСО 10816-1
|
|
|
Фаза и частота вращения
|
Вихретоковый, индуктивный или
оптический датчик
|
Каждый вал
|
Радиальное
|
|
|
|
Примечание 1 - В целях контроля состояния
обычно используют результаты измерений в ортогональных направлениях (под
углами ±45°). Другой возможностью является измерение в направлениях Х и Y. Результаты измерений
более информативны, если их проводят в направлениях, в которых жесткость машины
существенно различна.
Примечание 2 - Всегда рекомендуется измерять как постоянное
смещение, так и колебания относительно этого смещения. Для гидравлических
турбин это особенно важно ввиду относительно больших радиальных зазоров в
подшипниках.
Примечание 3 - Для вертикальных машин
измерения проводят в направлениях, где жесткость максимальна и минимальна.
Обычно эти направления связаны с расположением входного отверстия турбины.
Примечание 4 - Вибрация насоса
существенно изменяется при изменении режима работы. В идеале вибрация
минимальна в точке оптимального КПД. В других точках рабочей характеристики
вибрация будет выше. В любом случае измерения необходимо проводить в тех же
режимах работы, чтобы иметь возможность сопоставления результатов.
Примечание 5 - Машины малых и средних
размеров обычно не требуют контроля в реальном масштабе времени, поэтому для
получения информации, как правило, используют портативные сборщики данных.
Примечание 6 - При нежесткой связи между
валами используют свои отметки фазы для каждого вала.
Примечание 7 - На крупных осевых
вентиляторах при отсутствии доступа к подшипникам и валам привода измерения
проводят на корпусе вентилятора в направлениях Х и Y.
Примечание 8 - У вентиляторов консольного
типа измерения проводят только на максимально нагруженном подшипнике.
|
Приложение В
(рекомендуемое)
В.1 Характеристики машины
Для каждой машины, техническое
состояние которой контролируют, указывают следующую информацию:
- код классификации
оборудования;
- вид машины (например,
двигатель, генератор, турбина, компрессор, насос, вентилятор);
- источник питания (например,
электрический, гидравлический, пар, газ, двигатель внутреннего сгорания,
дизель);
- номинальную частоту вращения
(мин-1 или Гц);
- номинальную мощность (кВт);
- конфигурацию привода
(например, безредукторный привод, привод через ременную передачу или вал);
- вид опоры (жесткая или
податливая).
Кроме того, может быть указано,
является ли машина ведущей или ведомой.
В.2 Измерения
Для измерительной системы
указывают следующую информацию:
- дату и время проведения
измерений;
- вид измерительной системы;
- тип датчика вибрации1)
(например, вихретоковый датчик, датчик скорости, акселерометр);
- метод установки датчика
вибрации (например, ручной щуп, на магнит, на шпильку, на клей);
- точки1) и
направления1) измерений (словесное описание или указание кода);
- измеряемую величину (численное
значение);
- единицу измерений1)
(например, мкм, мм/с или м/с2);
- измеряемый параметр (например,
пиковое значение, размах, среднеквадратичное значение);
- измеряемую величину (например,
общая вибрация, зависимость амплитуды от времени, спектр);
- используемый способ обработки,
например БПФ и другая соответствующая информация (например, применяемые
фильтры, число спектральных линий, число усреднений).
Дополнительно может быть указана
следующая информация:
- частота вращения ротора во
время измерений (мин-1 или Гц);
- выходная мощность машины во
время измерений (кВт);
- другие существенные
характеристики режима работы машины (например, температура, давление);
- сведения о поверке аппаратуры (вид
и дата последней и последующей поверок).
1) В приложении D приведен пример соглашения о кодировании информации данного
вида.
В.3 Другие сведения
Кроме вышеуказанной, может быть
зарегистрирована и другая информация о машине и проведенных измерениях,
например, информация о мероприятиях, выполненных при техническом обслуживании.
Приложение С
(справочное)
С.1 Введение
Вибрация может быть вызвана разными
причинами. Обычно она является следствием повреждения и износа частей машины,
неправильного функционирования, неправильной сборки, некачественного
технического обслуживания или недостатков конструкции.
Одной из наиболее частых причин
вибрации является дисбаланс ротора. Он приводит к вибрации как самого ротора,
так и стационарных элементов конструкции машины. Особенно интенсивной эта
вибрация становится при совпадении частоты вращения ротора и одной из
собственных частот колебаний машины. Вибрация проявляется на оборотной частоте
ротора, которую обозначают 1х, и может быть уменьшена посредством балансировки,
заключающейся в добавлении или удалении масс в соответствующих точках ротора.
Фаза вибрации резко изменяется при прохождении ротором одной из собственных
частот колебаний машины. Если частота вращения ротора постоянна, то вибрация в
произвольной точке машины обычно остается неизменной.
Другой частой причиной вибрации
машин вращательного действия является несоосность валов и подшипников.
Различают два вида несоосности: внутреннюю и внешнюю. Внутренняя несоосность
имеет место при несовпадении осей двух элементов машины, когда один из этих
элементов находится внутри другого. Примером может служить неравномерный
воздушный зазор между ротором и статором электродвигателя. Внешняя несоосность
имеет место, когда оси двух сопрягаемых элементов машины параллельны или
находятся под некоторым углом друг к другу. Несоосность обусловливает появление
сил, которые вызывают вибрацию обычно на первой (1х), второй (2х) или третьей
(3х) гармонике оборотной частоты в радиальном направлении и даже, в зависимости
от степени развития данного дефекта, на гармониках более высокого порядка.
С.2 Вибрация в радиальном
направлении
В таблице С.1 указаны наиболее
типичные причины вибрации машин в радиальном направлении, связанной с частотой
вращения ротора, указаны характерные частоты, на которых проявляется эта
вибрация; дана другая информация, используемая при решении проблем,
обусловленных вибрацией. Однако следует иметь в виду, что эта информация
неполна, и могут существовать другие составляющие вибрации, требующие
рассмотрения.
На начальном этапе программы
контроля состояния машин рекомендуется выявить все возможные причины появления
вибрации и связать их с особенностями конструкции и режима работы машины, чтобы
составить перечень характерных частотных составляющих. В этот перечень входят
составляющие на оборотной частоте и ее гармониках, на частоте прецессии ротора,
лопастных частотах, частотах зацепления зубчатых передач, характерных частотах
подшипников качения и др. Данный перечень можно использовать для установления
базового уровня для отдельных частотных составляющих спектра (см. 7.4), процедур
контроля, определения уровня ПРЕДУПРЕЖДЕНИЕ, выбора времени сбора данных,
диагностических процедур и т.д.
Анализ частотных составляющих
позволяет получить ценную информацию для выявления возможных неисправностей
машины. При проведении анализа следует также уделять внимание информации об
изменении фазы частотной составляющей (вследствие изменения частоты вращения
или по каким-либо другим причинам), стабильности и повторяемости амплитуды
частотной составляющей, направлении действия вибрации относительно оси ротора и
точках машины, где вибрация максимальна.
Таблица С.1 - Наиболее типичные причины вибрации в радиальном
направлении и характерные признаки, связанные с нею
|
Причины
|
Характерные частоты
|
Примечания
|
|
Дисбаланс
|
1х
|
Дисбаланс изменяет
вектор оборотной составляющей. Вибрация максимальна при совпадении частоты
вращения с критической скоростью ротора. Фаза резко изменяется при
прохождении через критическую скорость. На фиксированной частоте вращения
вибрация постоянна
|
|
Несоосность
подшипника
|
1х или высшие
гармоники
|
Параллельное
смещение или перекос подшипников обычно вызваны движением фундамента.
Несоосность подшипника не является непосредственной причиной вибрации, но
изменяет динамические характеристики опорной системы
|
|
Несоосность
вала
|
1х, 2х или
высшие гармоники
|
Несоосность
валов из-за неточности сборки приводит к появлению вибрации вследствие
действия изгибных сил на ротор. В некоторых случаях осевая вибрация сравнима
с радиальной
|
|
Условия работы (геометрия) подшипника скольжения
|
Субгармоники
или 1х, 2х, 3х
|
Изменения условий работы подшипников или их геометрии могут вызвать
изменения на оборотной и высшей гармониках при стационарной вибрации или быть
причиной появления субгармоник вследствие прецессионного движения ротора. В
последнем случае вибрация обычно нестационарна и может повышаться со
временем, зачастую весьма быстро
|
|
Износ
элементов подшипника качения
|
Боковые
полосы высокочастотной составляющей
|
Для обнаружения
требуется датчик с высокочастотной характеристикой. Вибрация локализована в
области дефектного подшипника. Обычно она нестабильна и повышается со
временем. Для описания данного вида повреждения часто необходимы специальные
методы анализа
|
|
Асимметрия
жесткости (например, пазы ротора электродвигателя)
|
2х
|
Вибрация
возрастает, когда вторая гармоника оборотной частоты совпадает с критической
частотой вращения ротора. На фиксированной частоте вращения вибрация
постоянна. Для компенсации данного источника вибрации в крупных машинах
применяют компенсирующие пазы
|
|
Изгиб ротора
(см. также тепловые эффекты)
|
1х, 2х или
высшие гармоники
|
Обычно
изменяется вибрация на оборотной частоте. Если ротор изогнут вблизи места сопряжения,
то часто наблюдается высокая осевая вибрация на второй гармонике оборотной
частоты. На фиксированной частоте вращения вибрация постоянна
|
|
Трещина в
роторе
|
Рост вибрации
второй гармоники оборотной частоты указывает, что размеры поперечной трещины
ротора достигают критических размеров. Также могут иметь место изменения
вибрации на первой и высшей гармониках
|
|
Ослабление в
соединениях частей ротора
|
1х и другие
гармоники
|
Характер вибрации
непостоянный и изменяющийся от пуска к пуску. Иногда могут наблюдаться
субгармоники частоты вращения
|
|
Эксцентриситет
или некруглость цапф
|
1х и (в
случае некруглости) другие гармоники
|
Вибрация
может отличаться от обычной или быть чрезмерно большой на низких частотах
вращения ротора и на его критических частотах. На фиксированной частоте
вращения вибрация постоянна
|
|
Тепловые
эффекты (асимметрия)
|
1х
|
Могут быть
обусловлены неравномерным охлаждением ротора, замыканием обмоток
электродвигателя или разными усилиями затяжки разных частей ротора. Вызывают
прогиб ротора и по своим проявлениям схожи с дисбалансом
|
|
Дефекты
зубчатой передачи
|
Высокочастотная
вибрация на гармониках зубцовой (оборотной) частоты и боковых полосах
|
Для обнаружения
требуется датчик с высокочастотной характеристикой. Если дефектен один зуб,
то вибрация возникает на оборотной частоте и ее гармониках. При общем износе
зубьев возникает вибрация на гармониках зубцовой частоты и их боковых полосах
|
|
Резонанс
|
На частоте
возбуждения (например, когда частота вращения ротора совпадает с собственной
частотой системы «ротор-опора»)
|
Вибрация
усиливается при совпадении частоты вращения ротора с какой-либо частотой
резонанса. При прохождении ротора через критическую частоту вращения
наблюдается скачок фазы. Наиболее частой причиной возбуждения резонансов
невращающихся частей машины является резонанс ротора. У электрических машин
резонанс часто возбуждается составляющей на второй гармонике оборотной
частоты вследствие электромагнитных сил, которыми ротор действует на статор
|
|
Трение частей
машины
|
Обычно 1х, но
также ее гармоники, субгармоники и частоты резонансов
|
На небольших
скоростях трение можно обнаружить без вспомогательных средств. На высоких
скоростях оно может вызвать резкое повышение вибрации до значений, требующих
незамедлительного останова машины. Трение может быть следствием быстрых
изменений нагрузки или температурных полей в машине. Также его причиной может
быть слишком маленький зазор между движущимися и неподвижными частями или
смещение этих частей друг относительно друга во время работы
|
С.3 Угловая вибрация
Для крупных паротурбинных
генераторов существует большое число как штатных, так и нештатных ситуаций,
приводящих к передаче колебаний электрического происхождения на присоединенное
к генератору оборудование. Эти ситуации, а также связанные с ними характерные
составляющие вибрации указаны в таблице С.2. Данные ситуации всегда
сопровождаются переменными моментами сил, действующими на ротор генератора, что
в свою очередь вызывает угловую вибрацию вала и вибрацию других вращающихся и
невращающихся частей машин. Демпфирование угловой вибрации в турбогенераторах
очень мало по сравнению с демпфированием изгибных колебаний ротора. Это
объясняется тем, что при изгибных колебаниях демпфирование обусловлено сжатием
масляного слоя под цапфами ротора, а при угловой вибрации такая демпфирующая
среда отсутствует.
Как показано в таблице С.2,
возбуждения вследствие переходных процессов в электросети приводят к
многомодовым долго незатухающим колебаниям ротора турбогенератора. Частотный
спектр обычно сосредоточен в области низших гармоник мод угловых колебаний и,
кроме того, содержит составляющие на частотах возбуждения (обычно это первая и
вторая гармоники сетевой частоты).
В ряде случаев состояние
электросети способно привести к относительно небольшим, но устойчивым угловым
колебаниям ротора генератора (например, в случае нетранспонированной линии
электропередачи, несимметричной нагрузки). Обычно при этом основной частотой
возбуждения вала является удвоенная сетевая частота. Эта частота может
возбудить моды угловых колебаний турбогенератора относительно высокого порядка.
Такие режимы требуют применения сложных моделей для расчета связанных изгибных
колебаний лопаток турбины низкого давления и угловых колебаний ротора.
Современные конструкции крупных паротурбинных генераторов устойчивы к
возмущениям электрической природы, поэтому угловую вибрацию ротора контролируют
редко.
Таблица С.2 - Наиболее типичные причины угловой вибрации
турбоагрегатов и характерные признаки, связанные с нею
|
Причины
|
Характерные частоты
|
Примечания
|
|
Повреждение в
электросети, включая срабатывание прерывателя
|
Собственные частоты
угловых колебаний и гармоники сетевой частоты
|
Сигнал в виде переходного процесса. Многомодовые слабодемпфированные
угловые колебания вала
|
|
Внутренние
повреждения генератора, замыкание выходных контактов
|
Собственные частоты
угловых колебаний и гармоники сетевой частоты
|
Сигнал в виде
переходного процесса. Многомодовые слабодемпфированные угловые колебания вала
|
|
Рассинхронизация
генератора с сетью
|
Собственные
частоты угловых колебаний и сетевая частота
|
Сигнал в виде
переходного процесса. Многомодовые слабодемпфированные угловые колебания вала
|
|
Плановая
коммутация линий связи
|
Собственные
частоты угловых колебаний и гармоники сетевой частоты
|
Сигнал в виде
переходного процесса. Многомодовые слабодемпфированные угловые колебания вала
|
|
Изменение
нагрузки (например, влияние близко расположенной электродуговой печи)
|
Собственные
частоты угловых колебаний
|
Сигнал в виде
переходного процесса. Многомодовые слабодемпфированные угловые колебания вала
|
|
Несимметрия
фазовых напряжений в сети (нетранспонированная линия электропередачи)
|
Удвоенная
сетевая частота
|
Стационарные
механические колебания в окрестности удвоенной сетевой частоты; могут
сопровождаться угловыми колебаниями сопряженных валов и изгибными колебаниями
лопаток
|
|
Подсинхронный
резонанс
|
Подсинхронная
собственная частота
|
Нестабильные
колебания из-за резонанса в электросети (линии с продольной емкостной
компенсацией) или неправильное функционирование систем автоматического
управления постоянного тока
|
|
Заедание
опорных шеек на низкой частоте вращения
|
Собственные
частоты угловых колебаний
|
Слабодемпфированные
многомодовые колебания
|
|
Пульсирующие
моменты при пуске синхронного электродвигателя
|
Собственные
частоты угловых колебаний
|
Вибрация
максимальна при прохождении ротором собственных частот угловых колебаний
|
|
Влияние
выпрямителей для питания электродвигателей
|
Гармоники
сетевой частоты
|
Стационарные
вынуждающие силы
|
Приложение D
(рекомендуемое)
D.1 Введение
Рекомендации в отношении
информации, регистрируемой по результатам измерений, даны в приложении В. Настоящее
приложение указывает способ представления информации о точках измерений
вибрации в соответствии с соглашением Объединения открытых систем по управлению
данными в машиностроении [Machinery Information Management Open Systems Alliance (MIMOSA)]. По соглашению MIMOSA, основанному на действующих нормативных документах (например, [20]), практике
работ и логической взаимосвязи информации, позволяющей распространить
соглашение на случаи нетипичных ситуаций (например, для вертикальных машин),
представлению подлежат сведения о местах установки датчиков, их типе и
ориентации.
В процессе подготовки соглашения
было принято решение о включении дополнительно обозначений частей машин, таких как
валы и зубчатые колеса. Применяемый код позволяет также идентифицировать
датчики (преимущественно для измерений вибрации в осевом направлении),
установленные на противоположных концах машины, так что движение машины в
заданном направлении соответствует положительному сигналу с одного датчика и
отрицательному с другого. Эти дополнения, подробное описание которых приведено
ниже, не типичны для современных методов описания точек измерений. Однако можно
ожидать, что необходимость в них возникнет с распространением автоматических
экспертных систем диагностики. Если эти дополнения считают излишними или они не
соответствуют практике сбора данных, то следует предусмотреть средства
преобразования кода для удаления избыточной информации без возложения этой
обязанности на пользователя.
D.2 Соглашение MIMOSA
D.2.1 Определение
Соглашение определяет способ
указания местоположения датчика, его типа и ориентации. Шесть независимых
идентификаторов объединены в 14-символьный (без пробелов) код (см. таблицу D.1).
Пример - Код SFTA003AC090RN содержит следующую информацию о точке
и способе измерений: вал
А, корпус подшипника 3,
однокомпонентный акселерометр под углом
90° против часовой стрелки от
нулевой отметки фазы, радиальное
направление оси, нормальное направление
колебаний
Иллюстрирующие соглашение
примеры, приведенные ниже, не могут охватить все многообразие конструкций
машин. Тем не менее, следуя общим принципам соглашения можно надежно
идентифицировать особенности проведения любых измерений на машинах любого вида.
Таблица D.1
- Правила применения соглашения MIMOSA для точек измерений
|
Описание части кода
|
Длина части кода
|
Пример
|
|
Часть машины (вал, редуктор, барабан и
т.п.)
|
Четыре буквенно-цифровых символа
|
См. D.2.2
Если не определена - ХХХХ
|
|
Расположение (точка на конструкции
машины)
|
Три цифры
|
От 001 до 999
|
|
Тип датчика
|
Две буквы
|
См. таблицу D.2
Если не определена - XX
|
|
Угловое положение
|
Три цифры
|
От 000 до 360
Если не определена - XXX
|
|
Направление оси датчика
|
Одна буква
|
См. таблицу D.3
Если не определена - X
|
|
Направление движения
|
См. D.2.7
|
D.2.2
Части машин
Комбинация из четырех
произвольно задаваемых буквенно-цифровых символов позволяет идентифицировать
часть машины, на которой проводят измерения. Примеры таких комбинаций: для вала
А электродвигателя - MTRA,
для вала В насоса - РМРВ, для редуктора с валами С и D - GBXC и GBXD, для отдельного барабана - ROLL. Возможны другие комбинации, если для точного определения типа
измерений нужна дополнительная информация.
D.2.3 Расположение
датчика на корпусе машины
D.2.3.1 Общие положения
Последовательность цифр
указывает подшипник, на котором проводят измерения. Комбинации из трех цифр
достаточно, чтобы охватить возможные точки измерений практически любой машины.
D.2.3.2 Горизонтальные
машины
Примерами горизонтальных машин
(машин с горизонтальным расположением ротора) являются: турбины,
электродвигатели, насосы, вентиляторы, компрессоры, редукторы.
Нумерацию (точка 001) начинают с
крайнего подшипника неприводного конца привода и продолжают для подшипников
ведущего вала последовательно до последнего подшипника. Для машин с несколькими
валами, соединенными механизмами передачи, нумеруют последовательно подшипники
ведущего вала, продолжают нумерацию для подшипников ведомого вала и так до
последнего ведомого вала машины (см. рисунок D.1).
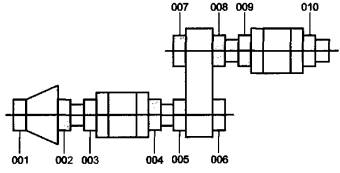
Рисунок D.1
- Обозначение подшипников турбины
Подшипники каждого
промежуточного вала нумеруют в том же порядке (см. рисунок D.2). При одновременной передаче движения на два
и более вала, сначала нумеруются подшипники ведущего вала, потом нумерацию
продолжают для подшипников каждого последующего вала (см. рисунок D.3).
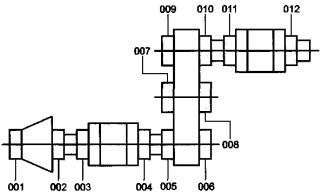
Рисунок D.2
- Обозначение подшипников для передачи с промежуточным валом
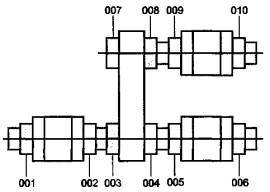
Рисунок D.3
- Обозначение подшипников для передачи с двумя и более ведомыми валами
Если ведомые валы присоединены к
обоим концам привода, то нумерацию начинают с крайнего подшипника вала с
неприводного конца привода (для паровых и газовых турбин это обычно вал
регулятора частоты вращения). Далее нумерацию продолжают в описанном выше
порядке (см. рисунок D.4).
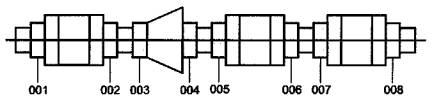
Рисунок D.4
- Обозначение подшипников, когда к приводу присоединены валы с обеих сторон
D.2.3.3 Вертикальные
машины
Порядок нумерации подшипников
вертикальных машин (машин с вертикальным расположением ротора) аналогичный.
Верхний подшипник обозначают 001, по мере движения вниз вдоль вала нумерация
возрастает (см. рисунок D.6).
D.2.4 Тип датчика
Тип датчика обозначают
комбинацией из двух букв, как указано в таблице D.2.
D.2.5 Угловое
положение точки измерений
D.2.5.1 Общие положения
Ниже приведены рекомендации для
определения углового положения датчика. Знак углового положения в 14-символьном
коде не указывают.
D.2.5.2 Горизонтальные
машины
Угловое положение датчика
определяют, измеряют от нулевой отметки, нанесенной по направлению часовой
стрелки, указывающей на цифру 3, если смотреть со стороны точки измерений 001
вдоль вала машины. Угол возрастает при движении против часовой стрелки
(независимо от направления вращения вала) от 0° до 360° (см. рисунок D.5).
Таблица D.2 - Обозначение типа датчика
|
Код
|
Тип датчика
|
Код
|
Тип датчика
|
|
АС
|
Однокомпонентный
акселерометр
|
PD
|
Датчик
динамического давления
|
|
AV
|
Однокомпонентный
акселерометр со встроенным интегратором
|
PS
|
Датчик
статического давления
|
|
AT
|
Трехкомпонентный акселерометр
|
SG
|
Датчик
деформаций
|
|
CR
|
Преобразователь
тока
|
ТС
|
Термопара
|
|
DP
|
Датчик
перемещения
|
TR
|
Термометр
сопротивления
|
|
DR
|
Датчик
перемещения, используемый как отметчик фазы
|
ТТ
|
Датчик
вращающего момента
|
|
LT
|
Датчик
перемещения на основе дифференциального трансформатора
|
ТО
|
Датчик
угловых колебаний
|
|
MP
|
Магнитный
датчик (отметчик фазы/датчик частоты вращения вала)
|
VL
|
Датчик
скорости
|
|
Ml
|
Микрофон
|
VT
|
Преобразователь
электрических напряжений
|
|
OP
|
Оптический
датчик
|
ОТ
|
Другой
|
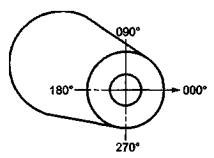
Рисунок D.5 - Отсчет углового положения датчика на горизонтальной машине
D.2.5.3 Вертикальные
машины
Нулевая отметка совпадает с
направлением потока. Угол возрастает при движении против часовой стрелки, если
смотреть сверху (точка 001) вниз (см. рисунок D.6). Отметку нуля для машин, у которых
направление потока может изменяться на противоположное (например, у
гидроаккумулирующих станций), наносят при направлении потока, когда машина
работает в режиме генератора.
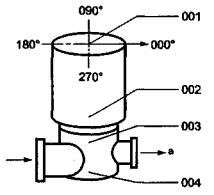
а Поток.
Рисунок D.6
- Отсчет углового положения датчика на вертикальной машине
D.2.6 Направление
измерительной оси датчика
D.2.6.1 Общие положения
Направление измерительной оси
датчика обозначают одной буквой (см. таблицу D.3 и рисунок D.7).
Таблица D.3 - Обозначение направления измерительной оси датчика
|
Код
|
Направление
|
Описание
|
|
R
|
Радиальное
|
Измерительная
ось датчика перпендикулярна к оси вала и пересекает ее
|
|
А
|
Осевое
|
Измерительная
ось датчика параллельна оси вала
|
|
Т
|
Тангенциальное
|
Измерительная
ось перпендикулярна к радиальному направлению и лежит в плоскости вращения
вала
|
|
Н
|
Горизонтальное
|
Измерительная
ось направлена под углом 000° или 180°
|
|
V
|
Вертикальное
|
Измерительная
ось направлена под углом 090° или 270°
|
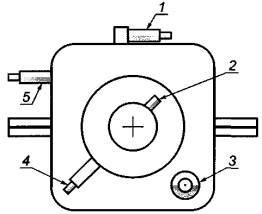
1 - тангенциальное ускорение ХХХАС090Т; 2 - радиальное перемещение XXXDP045R; 3 - осевое ускорение ХХХАС315А; 4-радиальное
ускорение XXXAC225R; 5 - ускорение в
горизонтальном направлении на патрубке ХХХАС135Н
Рисунок D.7 -
Направления измерительных осей датчиков
D.2.6.2 Связь направления
движения с полярностью сигнала
Соглашение устанавливает
следующие критерии.
а) Полярность сигнала
положительна (+), когда поверхность, на которой измеряют вибрацию, движется в
направлении на датчик, и отрицательна (-) в противоположном случае (см. рисунок
D.8). Правило применяют
для акселерометров и датчиков скорости, установленных на корпусе машины, а
также для датчиков перемещений бесконтактного типа.
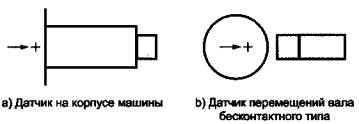
Рисунок D.8
- Правило определения направлении движения
b) При установке
пары датчиков (X,
Y) (см. рисунок D.9) в радиальном направлении
принимают, что датчик X расположен под углом 45° по часовой стрелке от биссектрисы
угла, образуемого точками X,
Y и центром
вала, а датчик Y - под углом 45° против часовой стрелки от биссектрисы этого
угла, если смотреть из точки измерений 001 (независимо от направления вращения
вала). Применение данного правила обеспечивает единообразное построение орбиты
движения вала.
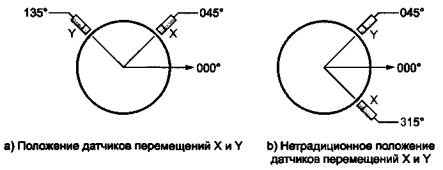
Рисунок D.9
- Обозначение датчиков перемещений бесконтактного типа
D.2.7
Направление движения
Последний символ кода принимает одно из двух значений: N (нормальное
направление) или R (обратное направление), - позволяющих идентифицировать два
расположенных друг напротив друга датчика, направление одного из которых
считают положительным (N),
а другого - отрицательным (R).
Примером могут служить пары противоположно направленных датчиков осевой
вибрации на противоположных концах машины (см. рисунок D.10). Осевое движение машины в
некотором заданном направлении принимают за положительное. Датчик осевой
вибрации, расположенный в точке 001, обозначают N, если движение поверхности в
положительном направлении создает в этом датчике сигнал положительной
полярности. Это же движение создаст сигнал отрицательной полярности в
противоположно направленном датчике, обозначаемом R. Для датчиков, измеряющих вибрацию в
радиальном направлении, направление движения определяется углом установки
датчика. Поэтому таким датчикам по умолчанию присваивается кодовый символ N.
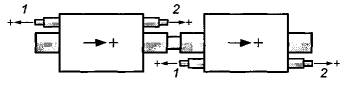
1 - обратное направление; 2 - нормальное направление
Рисунок D.10 - Нормальное
и обратное направления движения
Приложение ДА
(справочное)
Таблица ДА.1
|
Обозначение ссылочного
международного стандарта
|
Степень соответствия
|
Обозначение и наименование
межгосударственного стандарта
|
|
ИСО 1925:2001
|
-
|
*
|
|
ИСО 2041:1990
|
-
|
*
|
|
ИСО 7919-1:1996
|
IDТ
|
ГОСТ
ИСО 7919-1-2002
Вибрация. Контроль состояния машин по результатам измерений вибрации
на вращающихся валах. Общие требования
|
|
ИСО 10816-1:1995
|
IDТ
|
ГОСТ
ИСО 10816-1-97
Вибрация. Контроль
состояния машин по результатам измерений вибрации на невращающихся частях.
Часть 1. Общие требования
|
|
* Соответствующий национальный стандарт отсутствует. До его
утверждения рекомендуется использовать перевод на русский язык данного международного
стандарта. Перевод данного международного стандарта находится в Федеральном
информационном фонде технических регламентов и стандартов.
Примечание
- В настоящей таблице использовано следующее условное обозначение степени
соответствия стандартов:
- IDТ - идентичные стандарты.
|
|
[1]
|
ISO 2954, Mechanical vibration of rotating and reciprocating machinery
- Requirements for instruments for measuring vibration severity1)
|
|
[2]
|
ISO 5348, Mechanical vibration and shock - Mechanical mounting of
accelerometers2)
|
|
[3]
|
ISO 7919-2, Mechanical vibration - Evaluation of machine vibration by
measurements on rotating shafts - Part 2: Land-based steam turbines and
generators in excess of 50 MW with normal operating speeds of 1 500 r/min, 1
800 r/min, 3 000 r/min and 3 600 r/min3)
|
|
[4]
|
ISO 7919-3, Mechanical vibration - Evaluation of machine vibration by
measurements on rotating shafts - Part 3: Coupled industrial machines4)
|
|
[5]
|
ISO 7919-4, Mechanical vibration - Evaluation of machine vibration by
measurements on rotating shafts - Part 4: Gas turbine sets with fluid-film
bearings5)
|
|
[6]
|
ISO 7919-5, Mechanical vibration - Evaluation of machine vibration by
measurements on rotating shafts - Part 5: Machine sets in hydraulic power
generating and pumping plants
|
|
[7]
|
ISO 10816-2, Mechanical vibration - Evaluation of machine vibration by
measurements on non-rotating parts - Part 2: Land-based steam turbines and
generators in excess of 50 MW with normal operating speeds of 1 500 r/min, 1
800 r/min, 3 000 r/min and 3 600 r/min6)
|
|
[8]
|
ISO 10816-3, Mechanical vibration - Evaluation of machine vibration by
measurements on non-rotating parts - Part 3: Industrial machines with nominal
power above 15 kW and nominal speeds between 120 r/min and 15 000 r/min when
measured in situ7)
|
|
[9]
|
ISO 10816-4, Mechanical vibration - Evaluation of machine vibration by
measurements on non-rotating parts - Part 4: Gas turbine sets with fluid-film
bearings8)
|
|
[10]
|
ISO 10816-5, Mechanical vibration - Evaluation of machine vibration by
measurements on non-rotating parts - Part 5: Machine sets in hydraulic power
generating and pumping plants
|
|
[11]
|
ISO 10816-6, Mechanical vibration - Evaluation of machine vibration by
measurements on non-rotating parts - Part 6: Reciprocating machines with
power ratings above 100 kW
|
|
[12]
|
ISO 10817-1, Rotating shaft vibration measuring systems – Part 1:
Relative and absolute sensing of radial vibration9)
|
|
[13]
|
ISO 13374-1, Condition monitoring and diagnostics of machines - Data
processing, communication and presentation - Part 1: General guidelines
|
|
[14]
|
ISO 13379, Condition monitoring and diagnostics of machines - General
guidelines on data interpretation and diagnostic techniques10)
|
|
[15]
|
ISO 13380, Condition monitoring and diagnostics of machines - General guidelines
on using performance parameters11)
|
1) Соответствует ГОСТ
ИСО 2954-97 Вибрация машин с возвратно-поступательным и вращательным
движением. Требования к средствам измерений.
2) Соответствует ГОСТ
ИСО 5348-2002 Вибрация и удар. Механическое крепление акселерометров.
3) Соответствует ГОСТ
27165-97 Агрегаты паротурбинные стационарные. Нормы вибрации валопроводов и
общие требования к проведению измерений.
4) Соответствует ГОСТ
ИСО 7919-3-2002 Вибрация. Контроль состояния машин по результатам измерений
вибрации на вращающихся валах. Промышленные машинные комплексы.
5) Соответствует ГОСТ
ИСО 7919-4-2002 Вибрация. Контроль состояния машин по результатам измерений
вибрации на вращающихся валах. Газотурбинные агрегаты.
6) Соответствует ГОСТ
25364-97 Агрегаты паротурбинные стационарные. Нормы вибрации опор
валопроводов и общие требования к проведению измерений.
7) Соответствует ГОСТ
ИСО 10816-3-2002 Вибрация. Контроль состояния машин по результатам
измерений вибрации на невращающихся частях. Часть 3. Промышленные машины
номинальной мощностью свыше 15 кВт и номинальной скоростью от 120 до 15000 мин-1.
8) Соответствует ГОСТ
ИСО 10816-4-2002 Вибрация. Контроль состояния машин по результатам
измерений вибрации на невращающихся частях. Часть 4. Газотурбинные установки.
9) Соответствует ГОСТ
ИСО 10817-1-2002 Вибрация. Системы измерений вибрации вращающихся валов.
Часть 1. Устройства для снятия сигналов относительной и абсолютной вибрации.
10) Соответствует ГОСТ
Р ИСО 13379-2009 Контроль состояния и диагностика машин. Руководство по
интерпретации данных и методам диагностирования.
11)
Соответствует ГОСТ
30848-2003 (ИСО 13380:2002) Диагностирование машин по рабочим
характеристикам. Общие положения.
|
[16]
|
ISO 14694, Industrial
fans - Specifications f1or balance quality and vibration levels1)
|
|
[17]
|
ISO 14695, Industrial
fans - Method of measurement of fan vibration2)
|
|
[18]
|
ISO 17359, Condition
monitoring and diagnostics of machines - General guidelines3)
|
|
[19]
|
IEC 60034-14,
Rotating electrical machines - Part 14: Mechanical vibration of certain
machines with shaft heights 56 mm and higher - Measurement, evaluation and
limits of vibration4)
|
|
[20]
|
API 670, Machinery
protection systems
|
|
[21]
|
VDI 3839, Instructions
on measuring and interpreting the vibrations of machines
|
|
[22]
|
VDI 3841,
Schwingungsuberwachung von Maschinen - Erforderliche Messungen (Vibration
monitoring of machinery - Necessary measurements)
|
|
[23]
|
MIMOSA VB-001,
Machinery information management open systems alliance, conventions for
identifying vibration measurement locations5)
|
|
[24]
|
ГОСТ P 52526-2006 Установки газотурбинные с конвертируемыми
авиационными двигателями. Контроль состояния по результатам измерений
вибрации на невращающихся частях6)
|
|
[25]
|
ISO 13373-2,
Condition monitoring and diagnostics of machines - Vibration condition
monitoring - Part 2: Processing, analysis and presentation of vibration data6) 7)
|
1) Соответствует ГОСТ
31350-2007 (ИСО 14694:2003) Вибрация. Вентиляторы промышленные. Требования
к производимой вибрации и качеству балансировки.
2) Соответствует ГОСТ
31351-2007 (ИСО 14694:2003) Вибрация. Вентиляторы промышленные. Измерения
вибрации.
3) Соответствует ГОСТ
Р ИСО 17359-2009 Контроль состояния и диагностика машин. Общее руководство
по организации контроля состояния и диагностирования.
4) Соответствует ГОСТ
Р МЭК 60034-14-2008 Машины электрические вращающиеся. Часть 14.
Механическая вибрация некоторых видов машин с высотой оси вращения 56 мм и
более. Измерения, оценка и пределы вибрации.
5) Machinery Information
Management Open Systems Alliance (MIMOSA): http://www.mimosa.org.
6) Добавлен по сравнению с
оригиналом (ИСО 13373-1:2002).
7) Соответствует ГОСТ
Р ИСО 13373-2-2009 Контроль состояния и диагностики машин. Вибрационный
контроль состояния машин. Часть 2. Обработка, анализ и представление
результатов измерений вибрации.
Ключевые слова: контроль технического состояния,
диагностирование, вибрация, датчики, измерения, анализ
